文章目录
- 1、整体项目结构
- 1.1、 目录launch
- 1.2、文件CMakeLists.txt
- 1.3、文件package.xml
- 1.4、目录include
- 1.4、目录srv
在ROS框架下创建一个无人机的节点dji_sdk,实现必需的订阅(控制指令)、发布(无人机里程计)、服务(无人机起飞降落、控制权得很)功能,就能实现一个类似小车的底盘系统,之后就能使用ROS内置的算法建图、导航,同时也能用rviz可视化。
1、整体项目结构
我们使用版本melodic,在编码前需要在ROS工作空间的src下创建一个目录dji_sdk,完整的结构如下
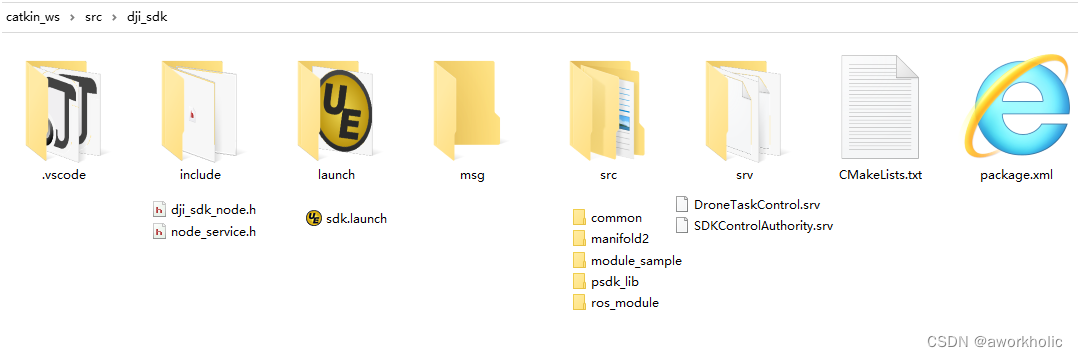
- 文件CMakeLists.txt:包含 ros 和 psdk 的管理
- 目录include:节点头文件,包含被外部启动的功能函数。
- 目录launch:sdk.launch启动文件&