第五章 深度学习
三、计算机视觉基本理论
11. 图像梯度处理
11.1 什么是图像梯度
图像梯度计算的是图像变化的速度。对于图像的边缘部分,其灰度值变化较大,梯度值也较大;相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小。一般情况下,图像梯度计算的是图像的边缘信息。
11.2 模板运算
模板(滤波器)是一个尺寸为 n*n 的小图像 W(n 一般取奇数,称为模板尺寸),每个位置上的值 w 被称为权重。在进行计算时,将模板的中心和像素 P 对齐,选取原始图像中和模板相同范围的邻域 N 的像素值作为输入。
模板卷积的计算是将对齐后的对应位置像素相乘,再进行累加作为像素 P 位置的输出值。记原始图像的像素灰度值为 s, 计算后的值为 d, 则 P 点的输出值 d = ∑ w i s i ∑ w i d = \frac{\sum w_i s_i}{\sum w_i} d=∑wi∑wisi
模板排序的计算时将邻域 N 的像素值进行排序,选择特定次序的灰度值,作为像素 P 位置的输出值,如最大值、最小值、中位数等。
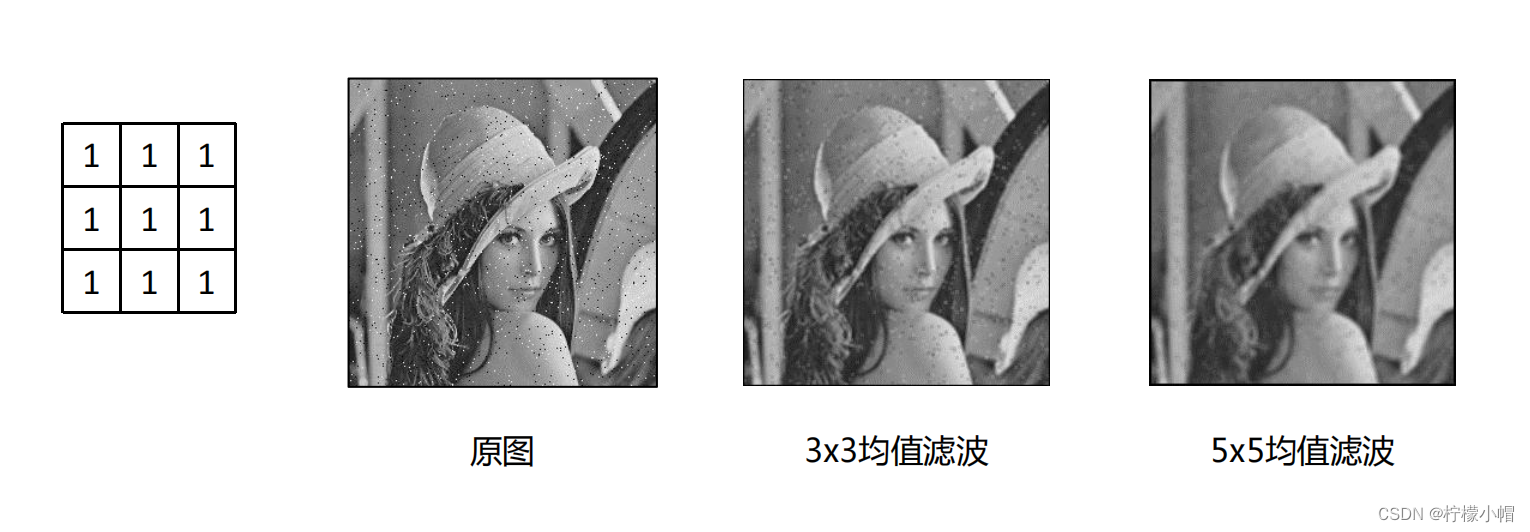
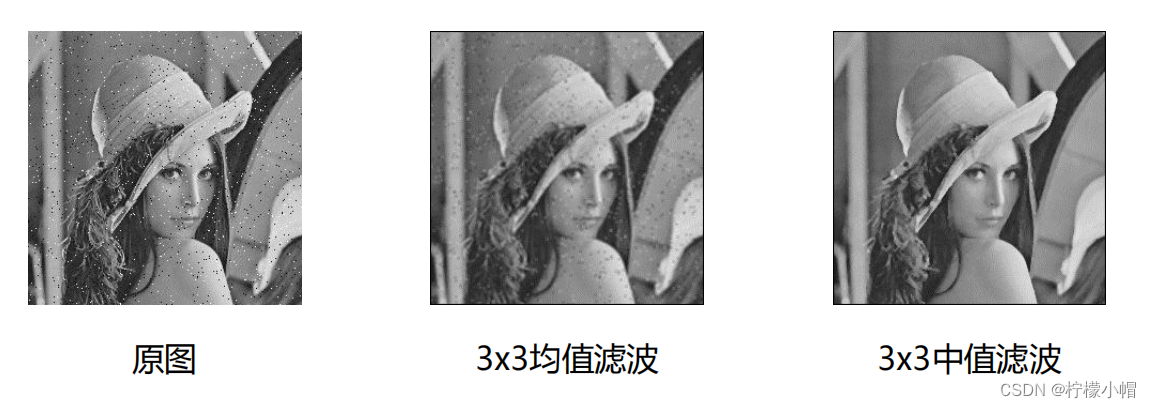
11.3 均值滤波
均值滤波指模板权重都为 1 的滤波器。它将像素的邻域平均值作为输出结果,均值滤波可以起到图像平滑的效果,可以去除噪声,但随着模板尺寸的增加图像会变得更为模糊。经常被作为模糊化使用。
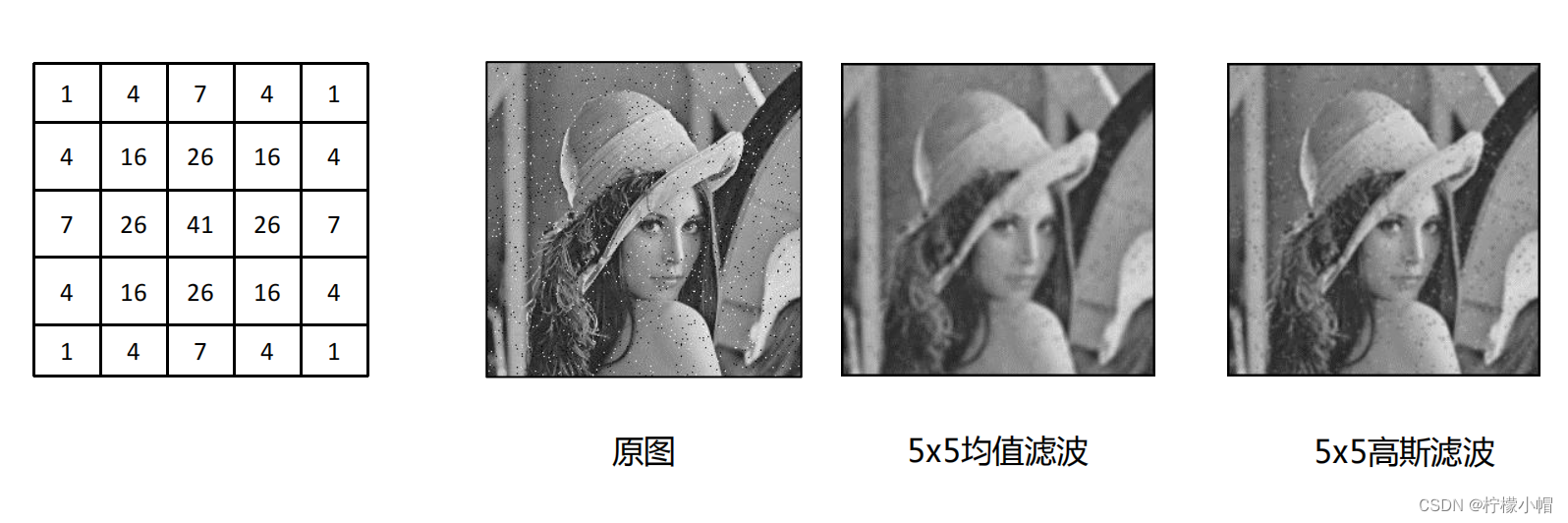
11.4 高斯滤波
为了减少模板尺寸增加对图像的模糊化,可以使用高斯滤波器,高斯滤波的模板根据高斯分布来确定模板系数,接近中心的权重比边缘的大。5 的高斯滤波器如下所示:
11.5 中值滤波
中值滤波属于模板排序运算的滤波器。中值滤波器将邻域内像素排序后的中位数值输出代替原像素值。它在实现降噪操作的同时,保留了原始图像的锐度,不会修改原始图像的灰度值。
中值滤波的使用非常普遍,它对椒盐噪声的抑制效果很好,在抑制随机噪声的同时能有效保护边缘少受模糊。但中值滤波是一种非线性变化,它可能会破坏图像中线性关系,对于点、线等细节较多的图像和高精度的图像处理任务中并不太合适。
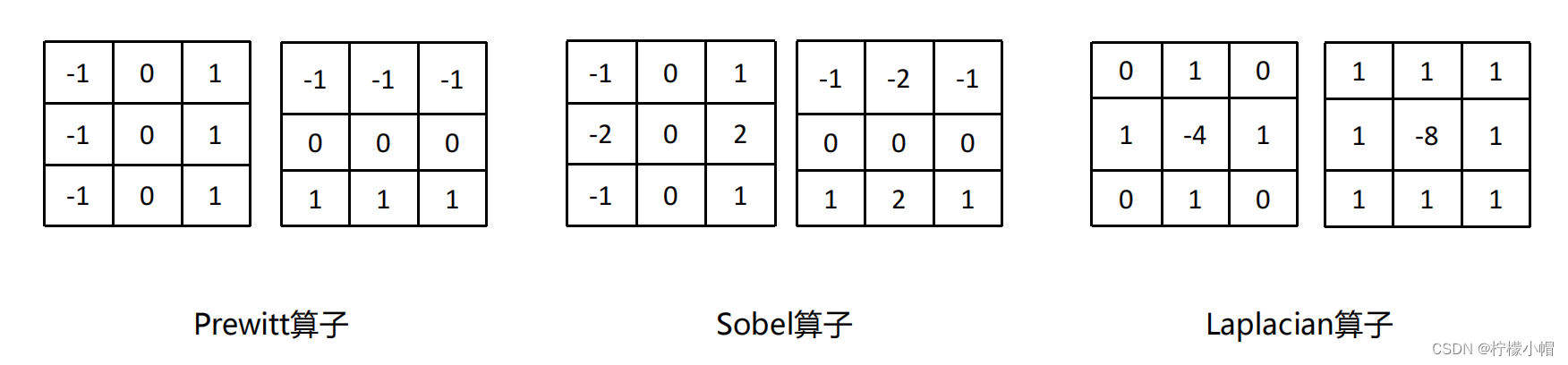
11.6 边沿检测
通过梯度计算可以获取图像中细节的边缘。为在锐化边缘的同时减少噪声的影响,通过改进梯度法发展出了不同的边缘检测算子:
- 一阶梯度:Prewitt 梯度算子、Sobel 梯度算子
- 二阶梯度:Laplacian 梯度算子
边沿检测效果

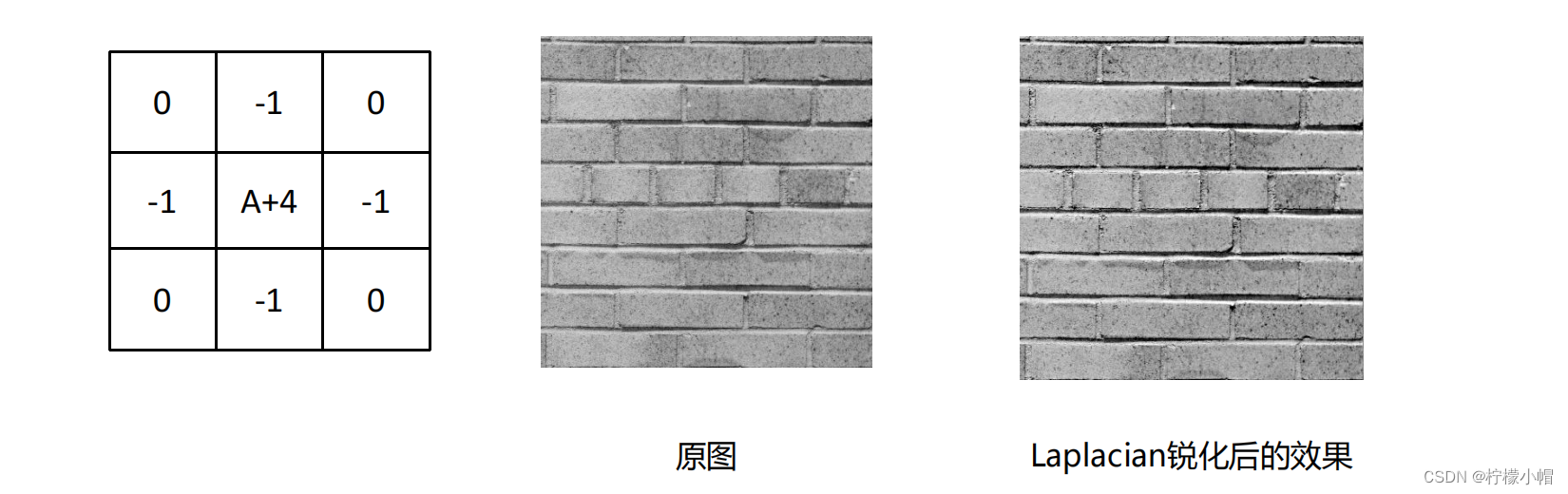
11.7 锐化
图像锐化与图像平滑是相反的操作,锐化是通过增强高频分量来减少图像中的模糊,增强图像细节边缘和轮廓,增强灰度反差,便于后期对目标的识别和处理。锐化处理在增强图像边缘的同时也增加了图像的噪声。
将求取的边缘按照一定系数比例叠加到原始图像上,即可实现对图像的锐化操作。例如使用 Laplacian 梯度算子进行锐化操作的模板,其中 A 是大于等于 1 的系数。
12. 图像轮廓
12.1 什么是图像轮廓
边缘检测虽然能够检测出边缘,但边缘是不连续的,检测到的边缘并不是一个整体。
图像轮廓是指将边缘连接起来形成的一个整体,用于后续的计算。
图像轮廓是图像中非常重要的一个特征信息,通过对图像轮廓的操作,我们能够获取目标图像的大小、位置、方向等信息。
图像轮廓操作包括:查找轮廓、绘制轮廓、轮廓拟合等。
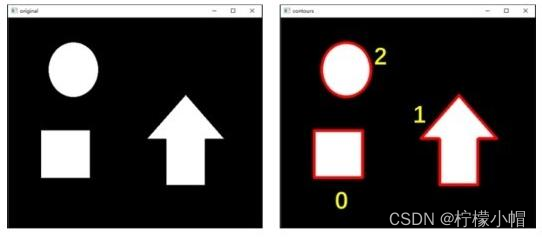
12.2 查找和绘制轮廓
一个轮廓对应着一系列的点,这些点以某种方式表示图像中的一条曲线,将这些点绘制成不同样式的线条,就是轮廓查找与绘制。
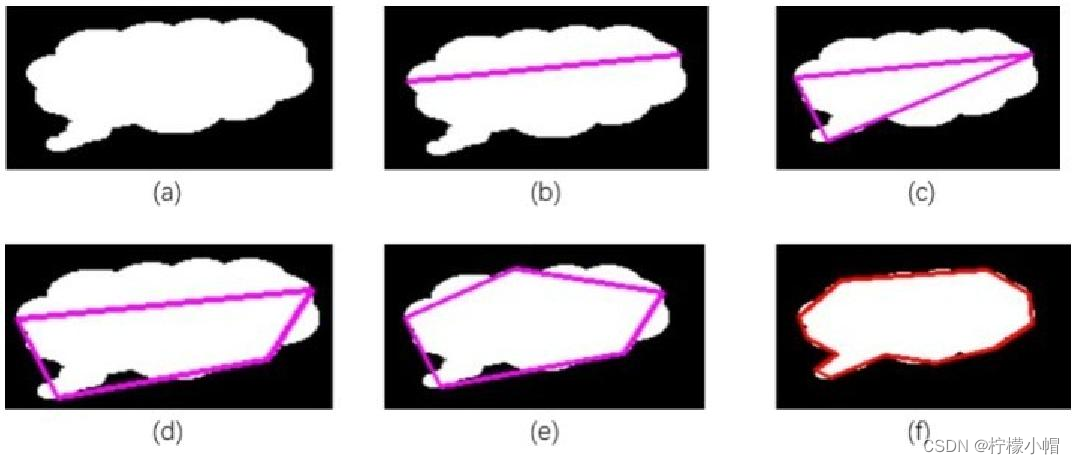
12.3 轮廓拟合
在计算轮廓时,可能并不需要实际的轮廓,而仅需要一个接近于轮廓的近似多边形,绘制这个近似多边形称之为轮廓拟合。
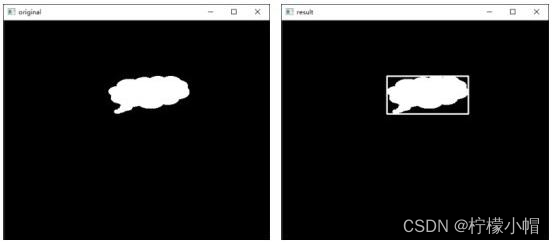
12.4 矩形包围框
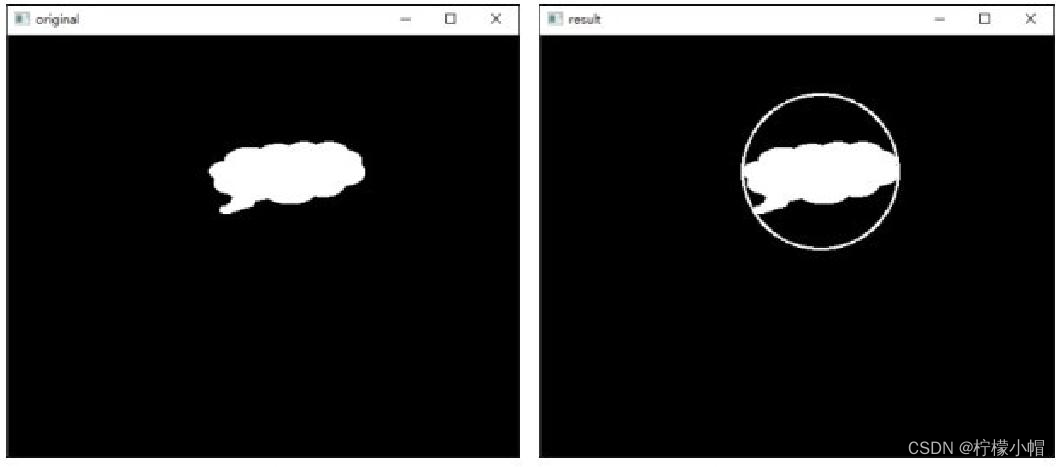
12.5 最小包围圆形
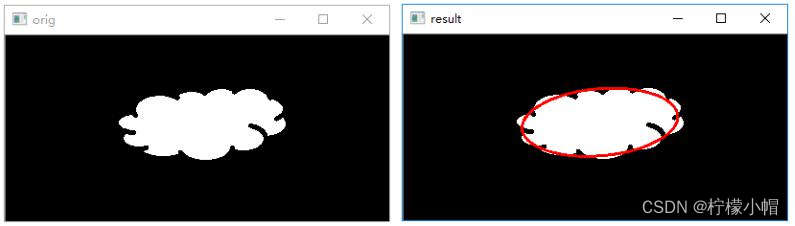
12.6 最优拟合椭圆
12.7 逼近多边形
13. 综合案例
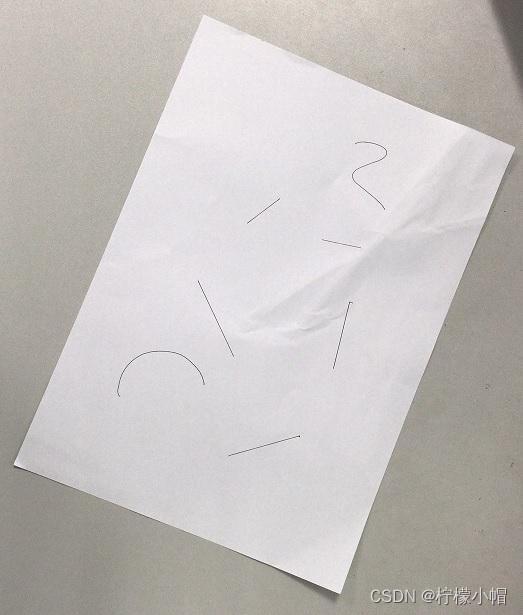
13.1 任务描述
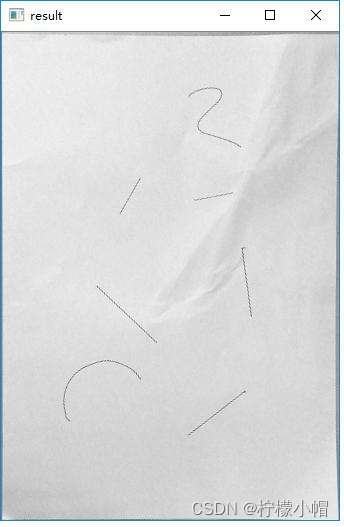
我们对图像中的目标进行分析和检测时,目标往往具有一定的倾斜角度,自然条件下拍摄的图像,完全平正是很少的。因此,需要将倾斜的目标“扶正”的过程就就叫做图像矫正。该案例中使用的原始图像如下图所示。
13.2 代码
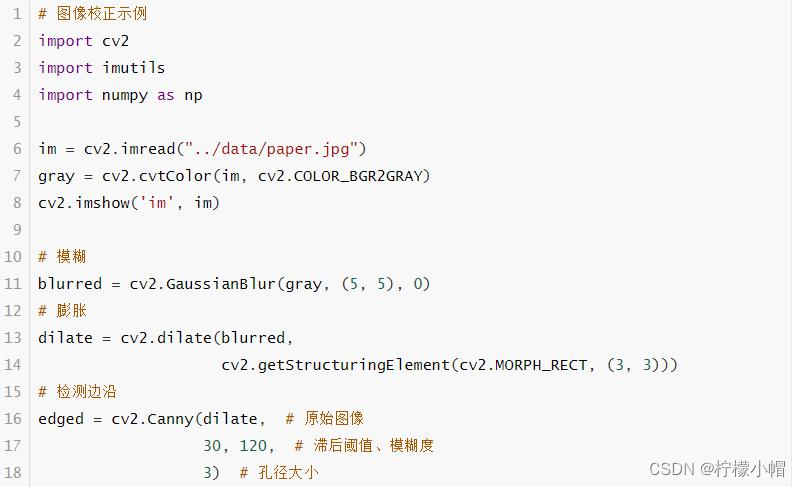
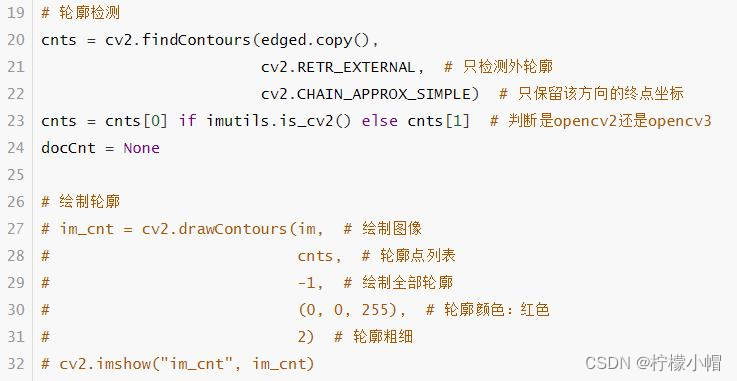

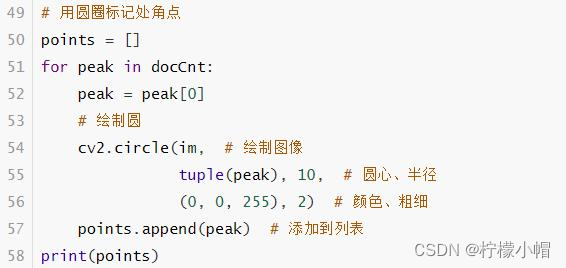
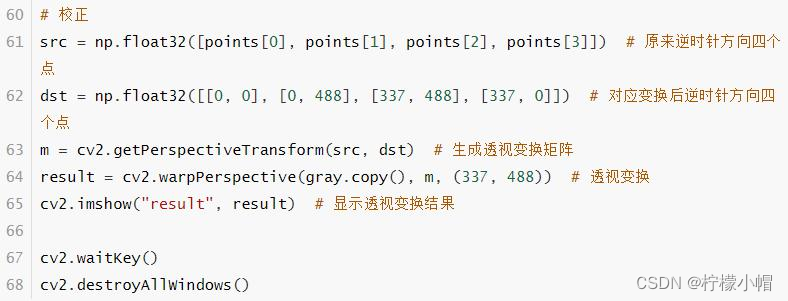
13.3 校正效果
14. 图像预处理在 AI 中的应用
14.1 图像预处理在 AI 中的应用
图像预处理的目的,是让图像数据更适合 AI 模型进行处理,例如调整大小、颜色。
通过图像预处理技术,实现数据集的扩充,这种方法称为数据增强。数据增强主要方法有:缩放,拉伸,加入噪点,翻转,旋转,平移,剪切,对比度调整,通道变化。
14.2 图像数据增强

14.3 纯图像技术的缺陷
到目前为止,我们使用的基本是纯图像技术,对图像大小、颜色、形状、轮廓、边沿进行变换和处理,但这些技术都有一个共同的缺点,即无法理解图像内容和场景,要实现这个目标,必须借助于深度学习技术。






![[STL-list]介绍、与vector的对比、模拟实现的迭代器问题](https://img-blog.csdnimg.cn/direct/5ab1fa04520c43bf9cb1360c3dba042e.png)