1、原理介绍
由Edelsbrunner H提出的alpha shapes算法是一种简单、有效的快速提取边界点算法。其克服了点云边界点形状影响的缺点,可快速准确提取边界点。如下图所示,对于任意形状的平面点云,若一个半径为a的圆,绕其进行滚动,其滚动的轨迹形成的点为轮廓点。需要注意的是,alpha shapes算法只能探测二维点的轮廓点。因此在提取点云轮廓点直线,需要将点投影在二维平面上,一般是XOY平面,此时将所有点的z坐标均设置成相同的常数即可,如z=0。


2、测试结果
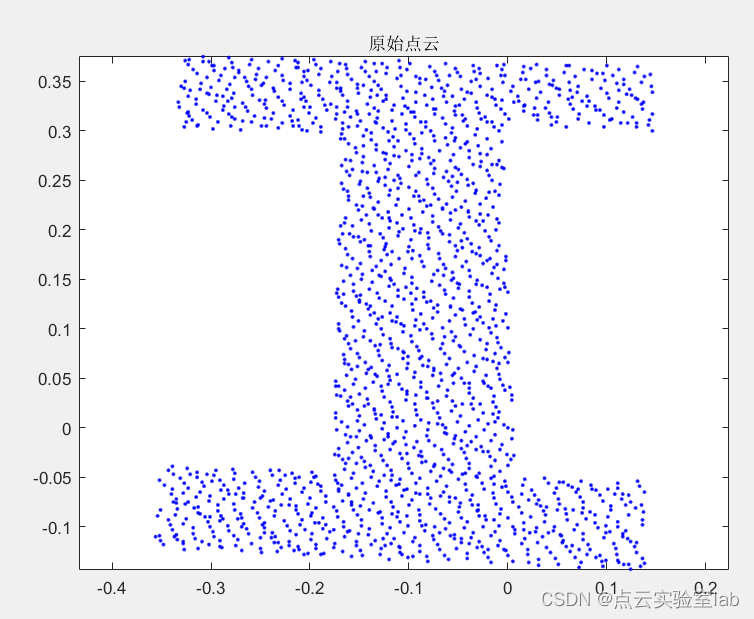
基于MATLAB的alpha shapes的边缘点提取,主要包括原始点云可视化、提取边缘点可视化、原始点云与提取边缘点可视化、滚动圆可视化4块部分。
代码下载链接:https://download.csdn.net/download/qq_32867925/89252183
在测试数据时,只需要将load中加载数据进行修改即可。使用是,将matlab软件当前路径设置为alphashapedetectbounpts.m文件所在路径。
部分代码展示:
使用kdtree搜索近邻点:
[idx,D]=rangesearch(data,data,2*r);%使用kdtree搜索近邻点判断一个点是否为边缘点:
for k=1:knn-1%少可一个点 for4x3=currentKNN(k,1);y3=currentKNN(k,2);d1=sqrt((x3-x2)*(x3-x2)+(y3-y2)*(y3-y2));d2=sqrt((x3-x21)*(x3-x21)+(y3-y21)*(y3-y21)); if (d1>r)count=count+1;elseif(d2>r)count01=count01+1;endend if (count==knn-1)bounpts=[bounpts;data(i,1),data(i,2)];circle_XY=[circle_XY;x2,y2];break;elseif (count01==knn-1)bounpts=[bounpts;data(i,1),data(i,2)]; circle_XY=[circle_XY;x21,y21];break;%终止for3 2.1无孔洞点云
如下图为无孔洞点云,alpha shapes提取的边缘点符合真实情况,将边缘点构成的圆进行可视化,可以发现滚动圆均位于外侧,表明该算法提取的边缘点,类似一个滚动圆滚动点云而得到。
 |  |
| 原始点云 | 边缘点提取结果 |
 |  |
| 原始点与边缘点 | 滚动圆与边缘点 |
2.2有孔洞点云
如下图为无孔洞点云,alpha shapes提取的边缘点符合真实情况,将边缘点构成的圆进行可视化,可以发现滚动圆均位于外侧,表明该算法提取的边缘点,类似一个滚动圆滚动点云而得到。同时,位于内部的边缘点,也被准确提取出,效果理想。
 |  |
| 原始点云 | 边缘点提取结果 |
 |  |
| 原始点与边缘点 | 滚动圆与边缘点 |
3、总结
基于alpha shapes提取边缘时,该方法只能提取位于一个平面上的点云数据的边缘,且只与滚动圆半径相关,提取效果一般比较理想。
基于matlab的源码下载链接:https://download.csdn.net/download/qq_32867925/89252183