上位机采用串口与下位机信,使用modbus通信协议控制和采集数据
可以参考一下(直接翻到modbus的章节):
MODBUS技术协议(第三章).pdf · chuan/临时的 - 码云 - 开源中国 (gitee.com)
首先实现通信用的modbus类
代码先实现了3个基础的功能 读输出状态、读保存寄存器和强置单线圈
public class Modbus{#region 基础设置private SerialPort serialPort;private byte[]? ReceivedData;private bool ReceiveFlag=false;public Modbus(string portName, int baudRate, Parity parity,StopBits stopBits, int dataBits){serialPort = new SerialPort();serialPort.PortName = portName;serialPort.BaudRate = baudRate;serialPort.Parity = parity;serialPort.StopBits = stopBits;serialPort.DataBits = dataBits;}public void OpenModbusConnet(){try{serialPort.Open();serialPort.DataReceived += SerialPort_DataReceived;}catch (Exception ex){throw new Exception("串口打开失败:" + ex.Message);}}private void SerialPort_DataReceived(object sender, SerialDataReceivedEventArgs e){int ReceivedDataLenth = serialPort.BytesToRead;ReceivedData = new byte[ReceivedDataLenth];serialPort.Read(ReceivedData, 0, ReceivedDataLenth);ReceiveFlag=true;}~Modbus(){if (serialPort is not null){if (serialPort.IsOpen)serialPort.Close();}}#endregion//等待数据返回,超过200毫秒退出等待private void awiteReceive(){ReceiveFlag= false;DateTime dateTime = DateTime.Now;while (ReceiveFlag == false){var t= DateTime.Now-dateTime;if(t.Milliseconds>200)ReceiveFlag= true;}}/// <summary>/// 发送报文/// </summary>/// <param name="cmd"></param>/// <exception cref="Exception"></exception>private void SendCommand(byte[] cmd){if (!serialPort.IsOpen){throw new Exception("modbus连接未打开");return;}try{serialPort.Write(cmd,0,cmd.Length);awiteReceive();}catch (Exception ex){throw new Exception("发送失败:"+ex.Message);}}#region 读输出状态 功能码0x01/// <summary>/// 读输出状态 功能码0x01/// </summary>/// <param name="SalavAddr"></param>/// <param name="StartAddr"></param>/// <param name="coils"></param>/// <returns>返回接收到的报文 <see langword="byte[]"/></returns>public byte[] ReadCoilsStatus(byte SalavAddr, int StartAddr, int coils){byte[] Cmd= FillMessage(SalavAddr,0x01, StartAddr, coils);try{SendCommand(Cmd);}catch (Exception ex){throw ex;}if (ReceivedData is not null && ReceivedData.Length is >3 ){if (ReceivedData[1] == (byte)0x01){if (verifyReciveCRC(ReceivedData)){return ReceivedData;}}}return null!;}#endregion#region 读取保持型(保存)寄存器 功能码0x03/// <summary>/// 读取保持型寄存器 功能码0x03/// </summary>/// <param name="SalavAddr"></param>/// <param name="StartAddr"></param>/// <param name="RegisterCount"></param>/// <returns>返回接收到的报文<see langword="byte[]"/></returns>public byte[] ReadRegister(byte SalavAddr, int StartAddr, int RegisterCount){byte[] Cmd = FillMessage(SalavAddr, 0x03, StartAddr, RegisterCount);try{SendCommand(Cmd);}catch (Exception ex){throw new Exception(ex.Message);}if (ReceivedData is not null && ReceivedData.Length is > 3){if (ReceivedData[1] == (byte)0x03){if (verifyReciveCRC(ReceivedData)){return ReceivedData;}}}return null!;}#endregion#region 强置单线圈 功能码0x05public enum ColiStatus{ ON=0xFF,OFF=0x00}/// <summary>/// 设置当个线圈的状态为ON高电平或低电平OFF/// </summary>/// <param name="SalavAddr"></param>/// <param name="CoilAddr"></param>/// <param name="ONOFF">断通标志=FF00,置线圈 ON(1)/// 断通标志=0000,置线圈 OFF(0)</param>/// <returns>返回接收到的报文<see langword="byte[]"/></returns>public byte[] ForceSingleCoil(byte SalavAddr, int CoilAddr, ColiStatus ONOFF){byte[] Cmd = FillMessage(SalavAddr, 0x05, CoilAddr,ONOFF== ColiStatus.ON ?65280:0000);//65280 ==0xFF00try{SendCommand(Cmd);}catch (Exception ex){throw ex;}if (ReceivedData is not null && ReceivedData.Length is > 3){if (ReceivedData[1] == (byte)0x05){if (verifyReciveCRC(ReceivedData)){return ReceivedData;}}}return null!;}#endregion/// <summary>/// 填充8位数据报文/// </summary>/// <param name="SalavAddr">从机地址</param>/// <param name="FCode">功能码</param>/// <param name="StartAddr">起始地址</param>/// <param name="dataBit">2位数据位</param>/// <returns>填充好的报文</returns>private byte[] FillMessage(byte SalavAddr, byte FCode, int StartAddr, int dataBit){byte[] message = new byte[8];message[0] = SalavAddr;message[1] = FCode;message[2] = (byte)((StartAddr - StartAddr % 256) / 256);//起始地址高位message[3] = (byte)(StartAddr % 256);//起始地址地位message[4] = (byte)((dataBit - dataBit % 256) / 256);message[5] = (byte)(dataBit % 256);var crc = CRC16(message);message[6] = crc[0];message[7] = crc[1];return message;}[DebuggerHidden]public byte[] CRC16(byte[] byteData){byte[] CRC = new byte[2];UInt16 wCrc = 0xFFFF;for (int i = 0; i < byteData.Length - 2; i++){wCrc ^= Convert.ToUInt16(byteData[i]);for (int j = 0; j < 8; j++){if ((wCrc & 0x0001) == 1){wCrc >>= 1;wCrc ^= 0xA001;}else{wCrc >>= 1;}}}CRC[1] = (byte)((wCrc & 0xFF00) >> 8);CRC[0] = (byte)(wCrc & 0x00FF);return CRC;}/// <summary>/// 校验接收到的数据是否正确/// </summary>/// <param name="byteData"></param>/// <returns>正确返回true</returns>[DebuggerHidden]private bool verifyReciveCRC(byte[] byteData){var resCrc = CRC16(byteData);if (resCrc[0] == byteData[byteData.Length - 2] &&resCrc[1] == byteData[byteData.Length - 1])return true;else return false;}}如果需要其他可能码基本都是复制粘贴改一下 if (ReceivedData[1] == (byte)0x05) 这个功能码就好
使用modbus类要先实例化一个,然后调用打开连接方法,就可以正常调用(使用)功能方法了
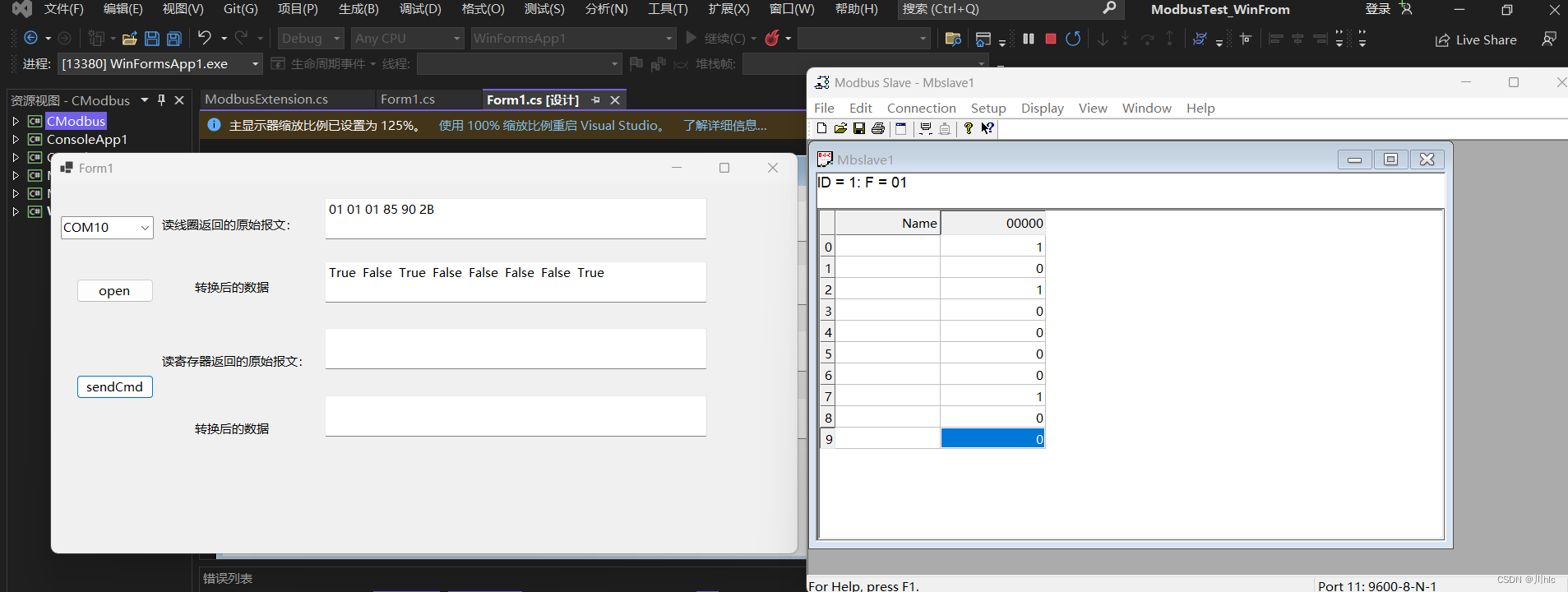
可以使用仿真软件进行测试
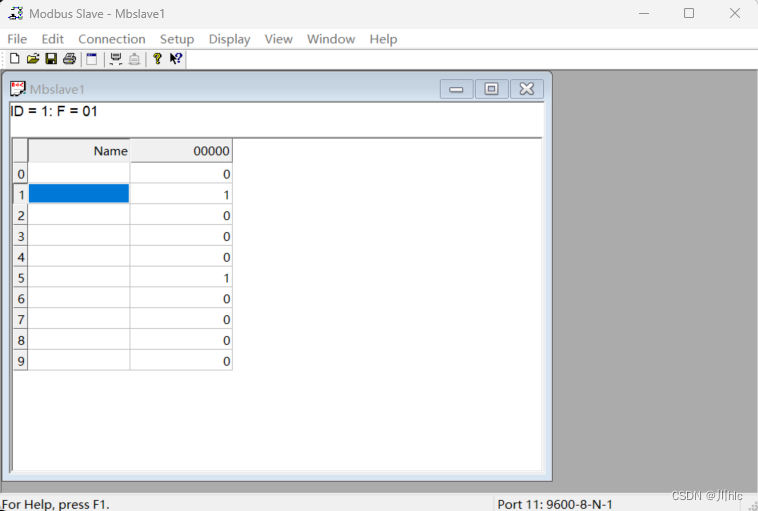
试了一下是能正常使用并返回正确报文
Modbus拓展方法:
再编写一个类,为返回的报文提供数据解析
public static class ModbusExtension{/// <summary>/// 提取读线圈返回的报文数据/// </summary>/// <param name="modbus"></param>/// <param name="bytes"></param>/// <returns><see langword="List<bool>"/> 下标0为起始地址线圈 </returns>public static List<bool> BytesOfReadColisToBoolList(this Modbus modbus, byte[] bytes) {List<bool> coilsStatas = new List<bool>();if (bytes is not null && bytes.Length >= 5){if (bytes[1] == (byte)0x01){for (int i = 0; i < Convert.ToInt32(bytes[2]); i++){for (int j = 0; j < 8; j++){coilsStatas.Add((byte)((byte)((byte)(bytes[i + 3] >> j) << 7) >> 7) == (byte)0x01 ? true : false);}}}}return coilsStatas;}/// <summary>/// 提取读寄存器返回的报文数据/// </summary>/// <param name="modbus"></param>/// <param name="bytes"></param>/// <returns><see langword="int[]"/>从0开始,每一项为一个寄存器的值/// error return null</returns>public static int[] BytesOfReadKeepRegisterToIntArr(this Modbus modbus,byte[] bytes){if (bytes is null || bytes.Length < 3) return null!;int dataLenth = (int)bytes[2];int[] result = new int[dataLenth / 2];int databitStart = 3;int RegisterLen = 2;int j = 0;try{for (int i = databitStart; i < dataLenth * 2; i += RegisterLen){if (i >= bytes.Length) break;result[j] = bytes[i];result[j] <<= 8;result[j] |= bytes[i + 1];j++;}}catch (Exception){}return result;}}简单测试
使用Winform测试
只有一个窗体代码如下
using CModbus;
using System.IO.Ports;
using Timer = System.Windows.Forms.Timer;namespace WinFormsApp1
{public partial class Form1 : Form{private Modbus? modbus;public Form1(){InitializeComponent();string[] portName= SerialPort.GetPortNames();this.comboBox1.DataSource= portName;}private void button1_Click(object sender, EventArgs e){string portname=this.comboBox1.SelectedValue.ToString()!;modbus = new Modbus(portname,9600,Parity.None,StopBits.One,8);modbus.OpenModbusConnet();}private void button2_Click(object sender, EventArgs e){if (modbus is not null){Timer t = new Timer();t.Interval = 1000;t.Tick += (_, _) => {var coilsData= modbus.ReadCoilsStatus(0x01,0000,0008);var str1= coilsData.Select(x => x.ToString("X2")+" ").ToArray();string t1="";string t2 = "";var coilStatus=modbus.BytesOfReadColisToBoolList(coilsData);for (int i = 0; i < str1.Length; i++){t1 += str1[i];}for (int i = 0; i < coilStatus.Count; i++){t2 += coilStatus[i].ToString()+" ";}textBox1.Text= t1;textBox2.Text= t2;//var RegisterData = modbus.ReadRegister(0x01, 0000, 0008);//var str2 = RegisterData.Select(x => x.ToString("X2") + " ").ToArray();//string t3 = "";//string t4 = "";//var RegisterValue = modbus.BytesOfReadKeepRegisterToIntArr(RegisterData);//for (int i = 0; i < str2.Length; i++)//{// t3 += str2[i];//}//for (int i = 0; i < RegisterValue.Length; i++)//{// t4 = RegisterValue[i].ToString()+" ";//}//textBox3.Text = t3;//textBox4.Text = t4;};t.Start();}}}
}}
读取8个线圈结果如下:
读寄存器:

最后简单实现了一下温度采集和一些控制

下位机链接:http://t.csdn.cn/TC52y
最后直接附上源码链接了:(3条消息) 【免费】c#上位机(温室监控系统源码)资源-CSDN文库