文章目录
- 一、代码仓库
- 二、旋转矩阵的推导及图形学中的矩阵变换
- 2.1 让横坐标扩大a倍,纵坐标扩大b倍
- 2.2 关于x轴翻转
- 2.3 关于y轴翻转
- 2.4 关于原点翻转(x轴,y轴均翻转)
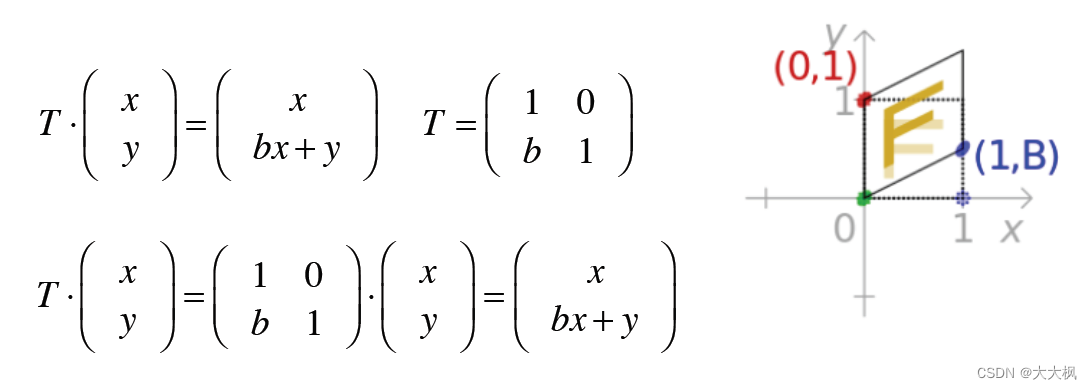
- 2.5 沿x方向错切
- 2.6 沿y方向错切
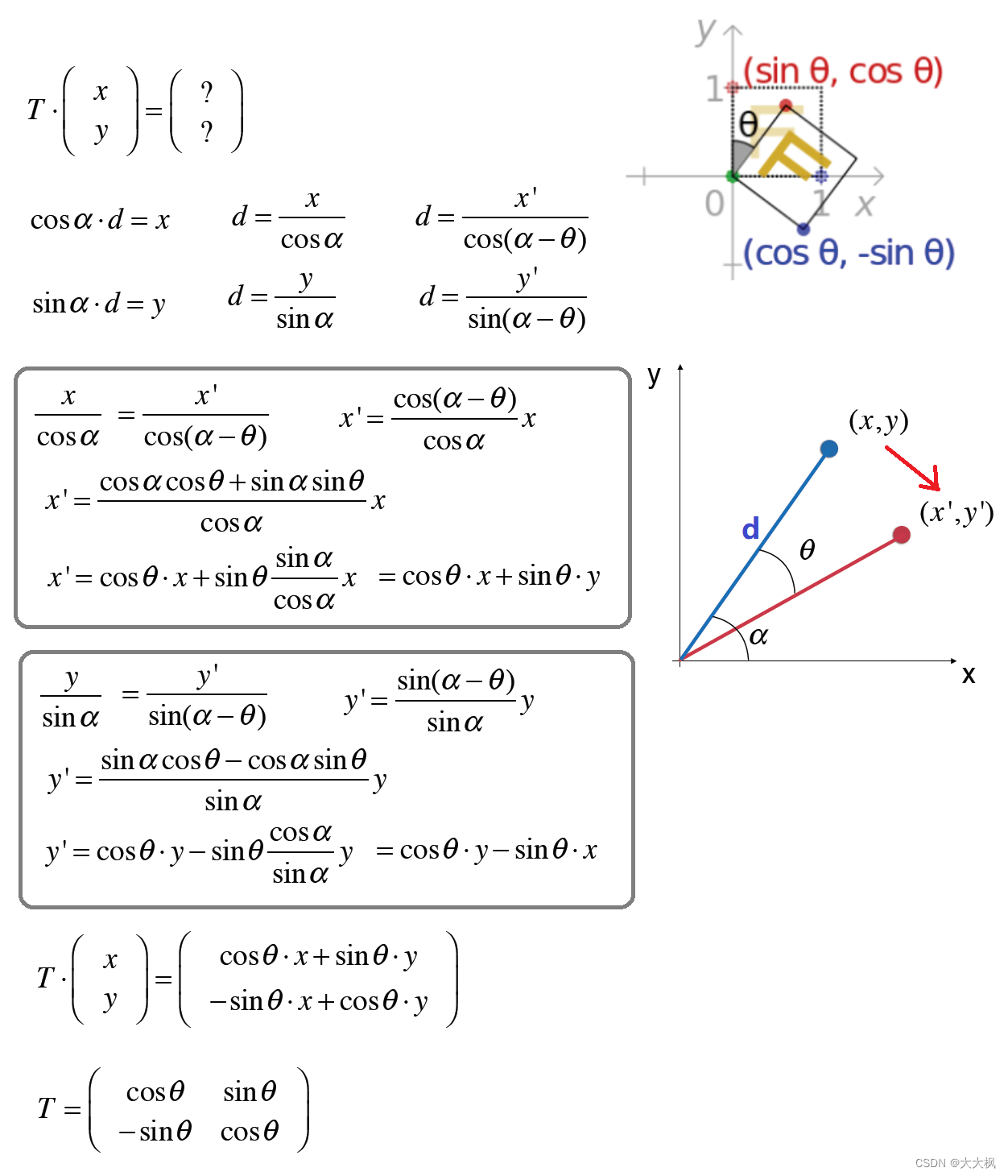
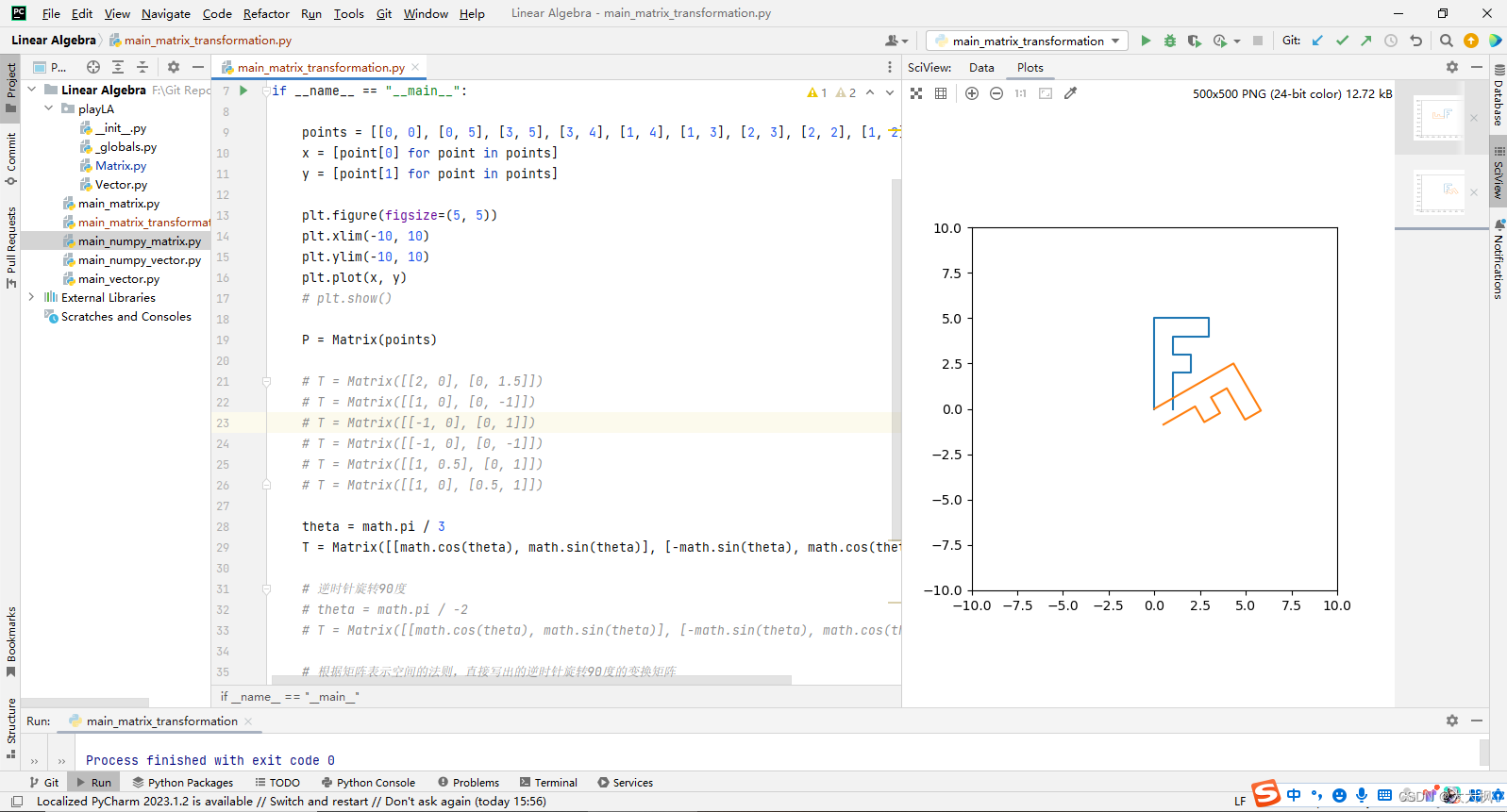
- 2.7 旋转
- 2.8 单位矩阵
- 2.9 矩阵的逆
- 三、看待矩阵的关键视角:用矩阵表示空间
- 3.1 行视角
- 3.2 列视角
- 3.3 标准单位向量和列视角
- 3.4 矩阵表示空间
- 四、代码
- matrix.py
- matrix_transformation
- numpy_matrix.py
一、代码仓库
https://github.com/Chufeng-Jiang/Python-Linear-Algebra-for-Beginner/tree/main
二、旋转矩阵的推导及图形学中的矩阵变换
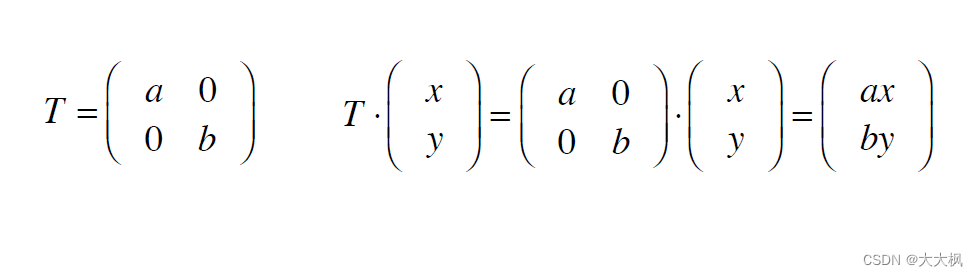
2.1 让横坐标扩大a倍,纵坐标扩大b倍
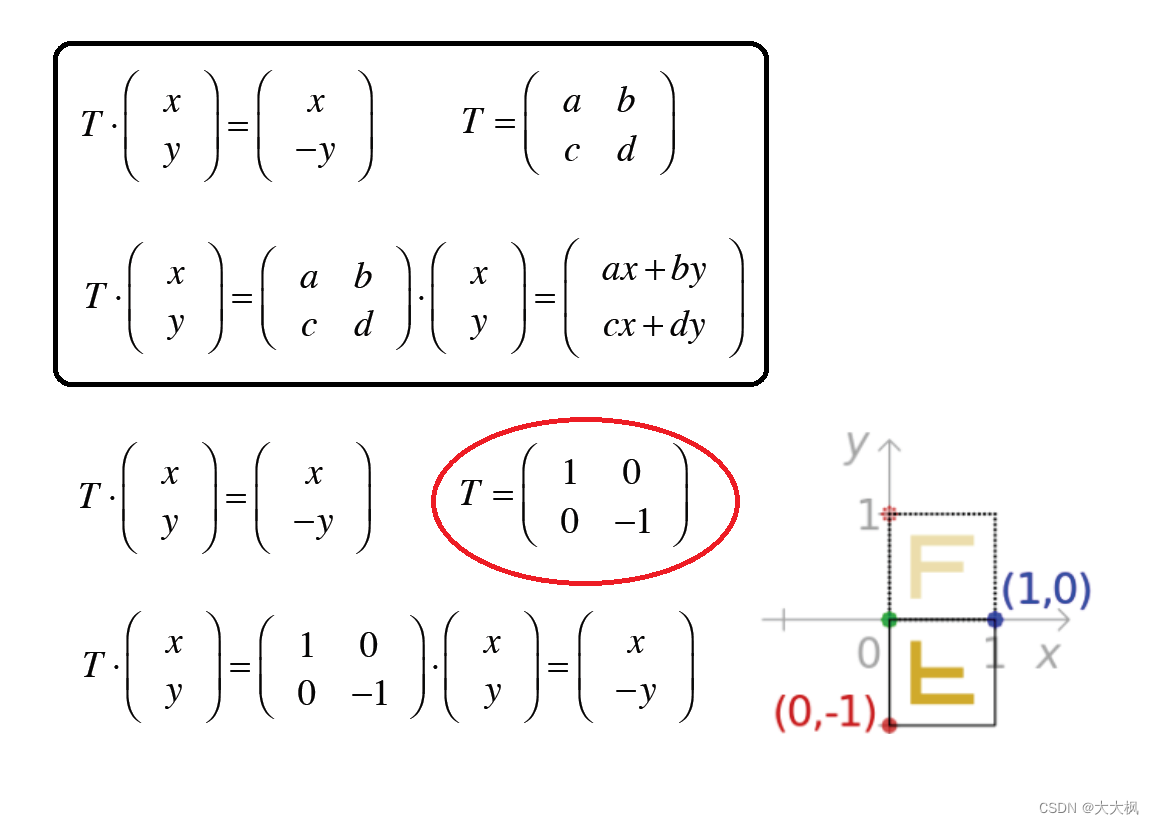
2.2 关于x轴翻转
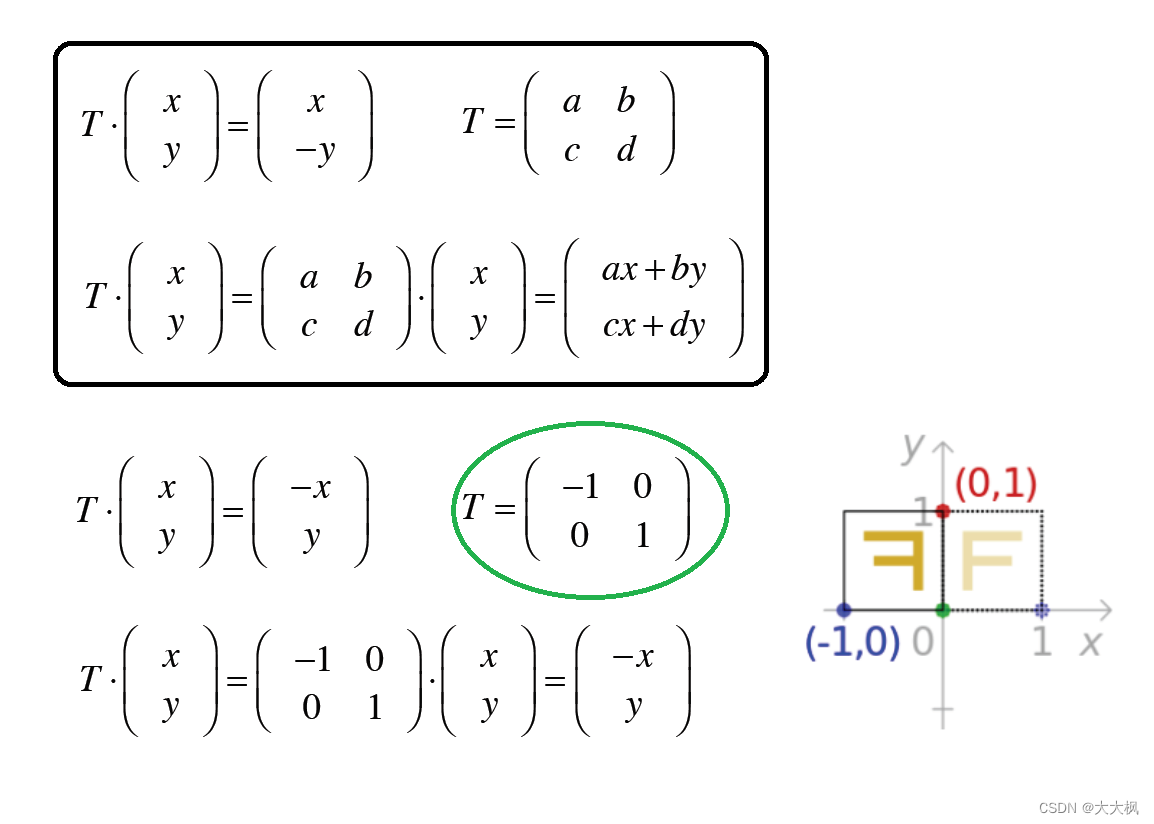
2.3 关于y轴翻转
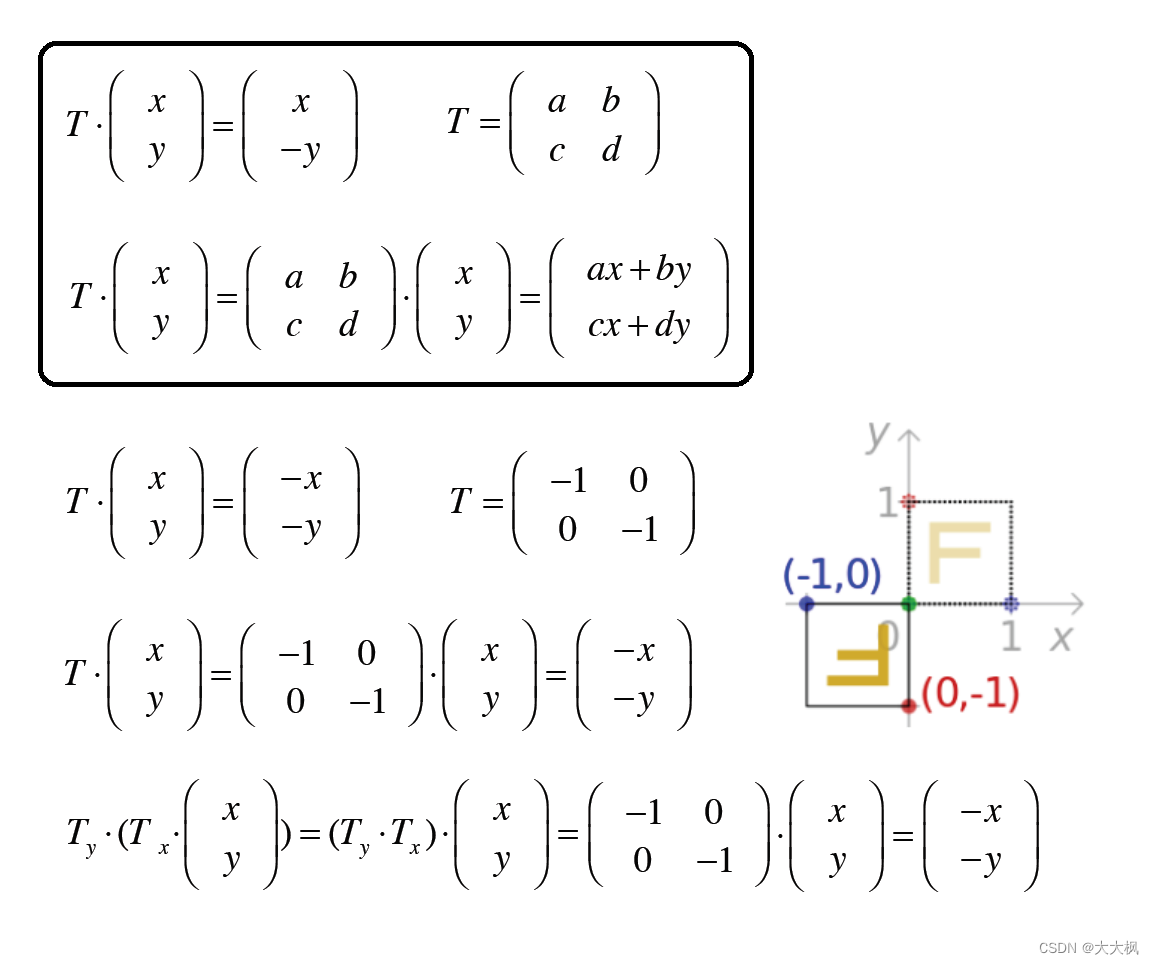
2.4 关于原点翻转(x轴,y轴均翻转)
2.5 沿x方向错切

2.6 沿y方向错切
2.7 旋转
theta = math.pi / 3
T = Matrix([[math.cos(theta), math.sin(theta)], [-math.sin(theta), math.cos(theta)]])
2.8 单位矩阵
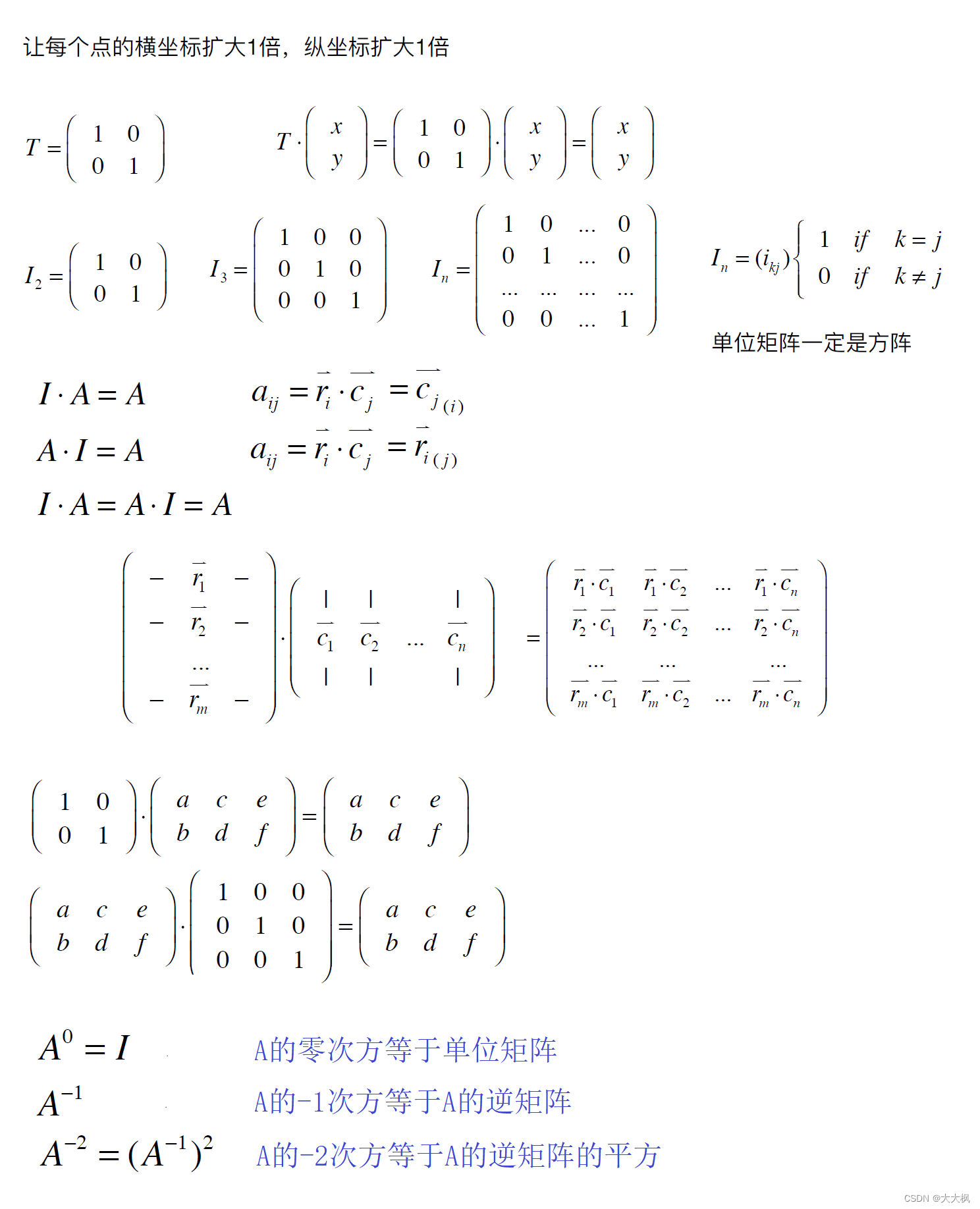
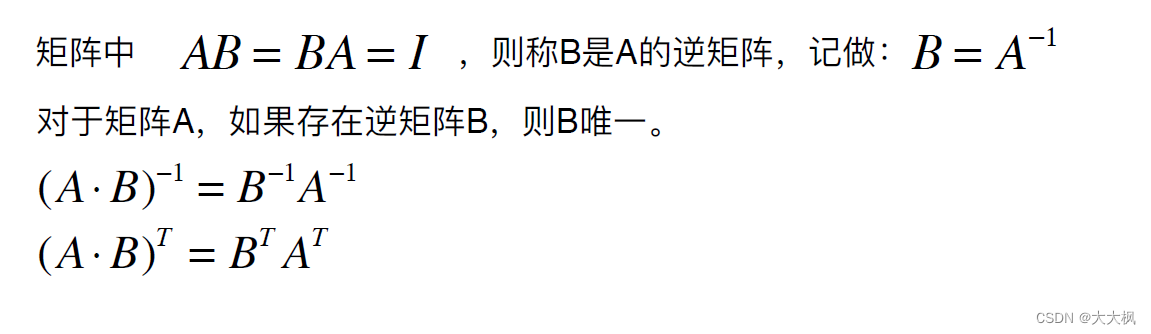
2.9 矩阵的逆
三、看待矩阵的关键视角:用矩阵表示空间
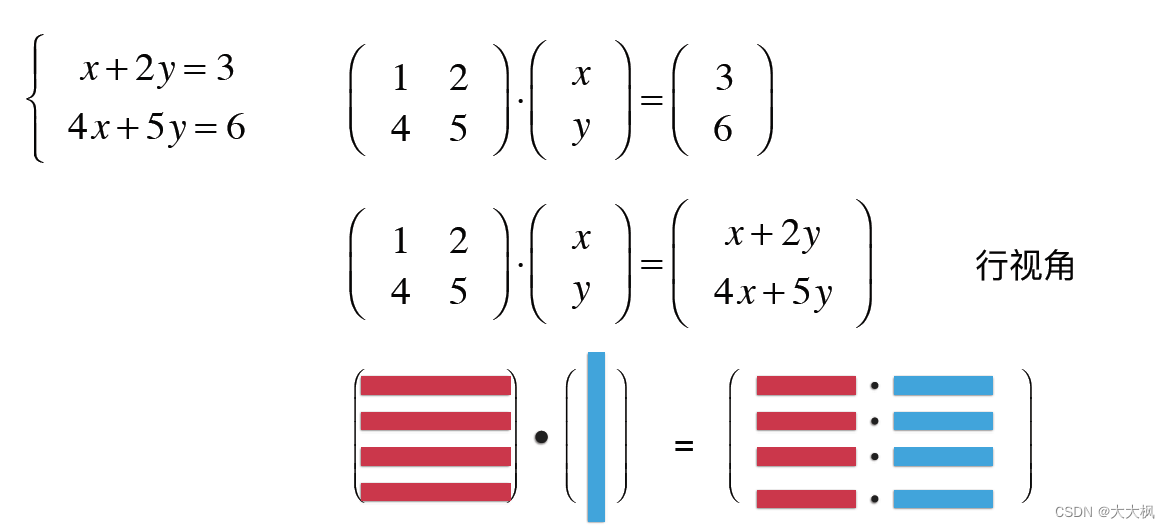
3.1 行视角
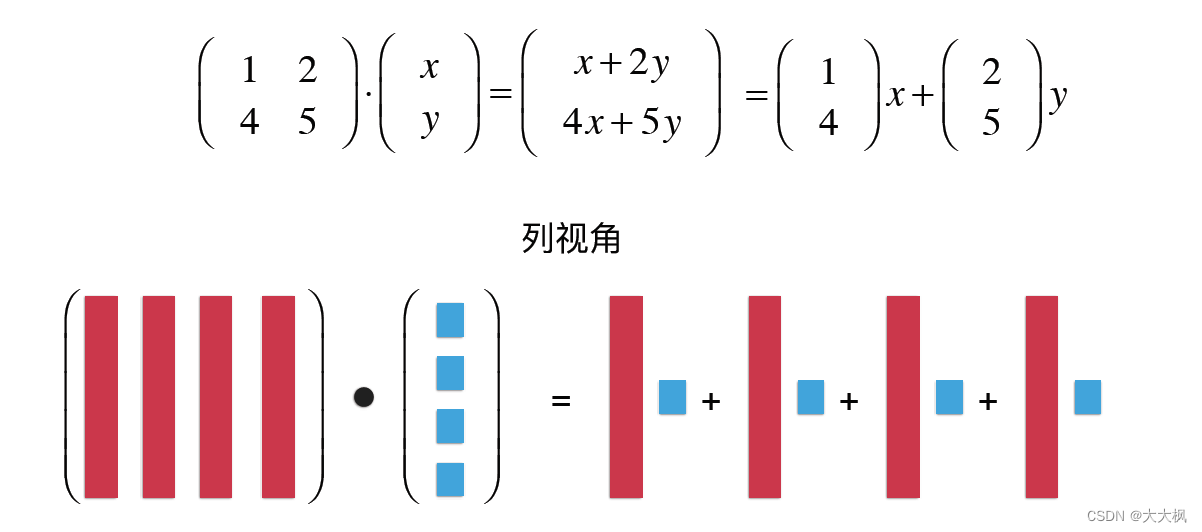
3.2 列视角
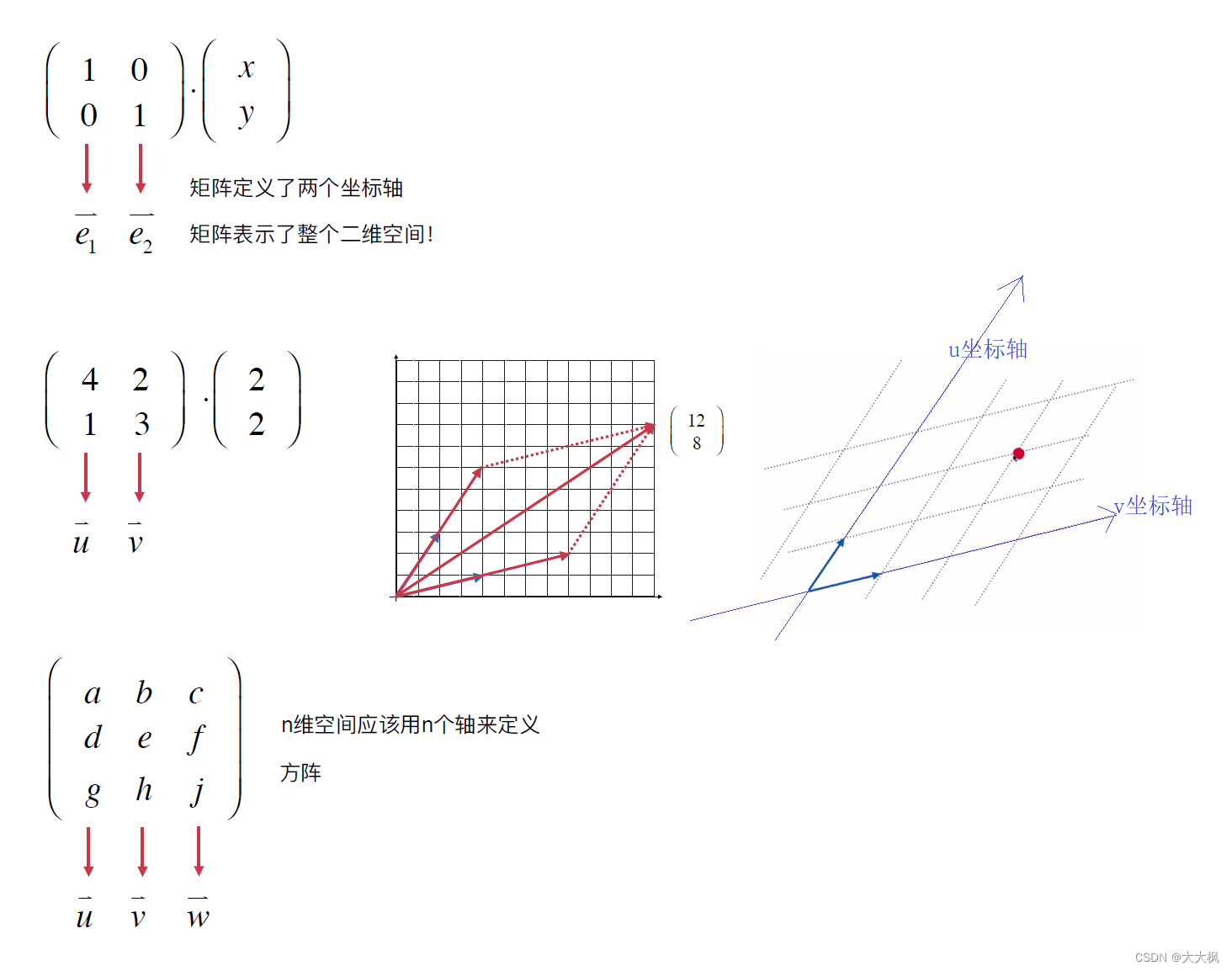
3.3 标准单位向量和列视角

3.4 矩阵表示空间
四、代码
matrix.py
from .Vector import Vectorclass Matrix:def __init__(self, list2d):self._values = [row[:] for row in list2d]@classmethoddef zero(cls, r, c):"""返回一个r行c列的零矩阵"""return cls([[0] * c for _ in range(r)])@classmethoddef identity(cls, n):"""返回一个n行n列的单位矩阵"""m = [[0]*n for _ in range(n)]for i in range(n):m[i][i] = 1;return cls(m)def T(self):"""返回矩阵的转置矩阵"""return Matrix([[e for e in self.col_vector(i)]for i in range(self.col_num())])def __add__(self, another):"""返回两个矩阵的加法结果"""assert self.shape() == another.shape(), \"Error in adding. Shape of matrix must be same."return Matrix([[a + b for a, b in zip(self.row_vector(i), another.row_vector(i))]for i in range(self.row_num())])def __sub__(self, another):"""返回两个矩阵的减法结果"""assert self.shape() == another.shape(), \"Error in subtracting. Shape of matrix must be same."return Matrix([[a - b for a, b in zip(self.row_vector(i), another.row_vector(i))]for i in range(self.row_num())])def dot(self, another):"""返回矩阵乘法的结果"""if isinstance(another, Vector):# 矩阵和向量的乘法assert self.col_num() == len(another), \"Error in Matrix-Vector Multiplication."return Vector([self.row_vector(i).dot(another) for i in range(self.row_num())])if isinstance(another, Matrix):# 矩阵和矩阵的乘法assert self.col_num() == another.row_num(), \"Error in Matrix-Matrix Multiplication."return Matrix([[self.row_vector(i).dot(another.col_vector(j)) for j in range(another.col_num())]for i in range(self.row_num())])def __mul__(self, k):"""返回矩阵的数量乘结果: self * k"""return Matrix([[e * k for e in self.row_vector(i)]for i in range(self.row_num())])def __rmul__(self, k):"""返回矩阵的数量乘结果: k * self"""return self * kdef __truediv__(self, k):"""返回数量除法的结果矩阵:self / k"""return (1 / k) * selfdef __pos__(self):"""返回矩阵取正的结果"""return 1 * selfdef __neg__(self):"""返回矩阵取负的结果"""return -1 * selfdef row_vector(self, index):"""返回矩阵的第index个行向量"""return Vector(self._values[index])def col_vector(self, index):"""返回矩阵的第index个列向量"""return Vector([row[index] for row in self._values])def __getitem__(self, pos):"""返回矩阵pos位置的元素"""r, c = posreturn self._values[r][c]def size(self):"""返回矩阵的元素个数"""r, c = self.shape()return r * cdef row_num(self):"""返回矩阵的行数"""return self.shape()[0]__len__ = row_numdef col_num(self):"""返回矩阵的列数"""return self.shape()[1]def shape(self):"""返回矩阵的形状: (行数, 列数)"""return len(self._values), len(self._values[0])def __repr__(self):return "Matrix({})".format(self._values)__str__ = __repr__matrix_transformation
import matplotlib.pyplot as plt
from playLA.Matrix import Matrix
from playLA.Vector import Vector
import mathif __name__ == "__main__":points = [[0, 0], [0, 5], [3, 5], [3, 4], [1, 4], [1, 3], [2, 3], [2, 2], [1, 2], [1, 0]]x = [point[0] for point in points]y = [point[1] for point in points]plt.figure(figsize=(5, 5))plt.xlim(-10, 10)plt.ylim(-10, 10)plt.plot(x, y)# plt.show()P = Matrix(points)# T = Matrix([[2, 0], [0, 1.5]])# T = Matrix([[1, 0], [0, -1]])# T = Matrix([[-1, 0], [0, 1]])# T = Matrix([[-1, 0], [0, -1]])# T = Matrix([[1, 0.5], [0, 1]])# T = Matrix([[1, 0], [0.5, 1]])theta = math.pi / 3T = Matrix([[math.cos(theta), math.sin(theta)], [-math.sin(theta), math.cos(theta)]])# 逆时针旋转90度# theta = math.pi / -2# T = Matrix([[math.cos(theta), math.sin(theta)], [-math.sin(theta), math.cos(theta)]])# 根据矩阵表示空间的法则,直接写出的逆时针旋转90度的变换矩阵#T = Matrix([[0, -1], [1, 0]])P2 = T.dot(P.T())plt.plot([P2.col_vector(i)[0] for i in range(P2.col_num())],[P2.col_vector(i)[1] for i in range(P2.col_num())])plt.show()
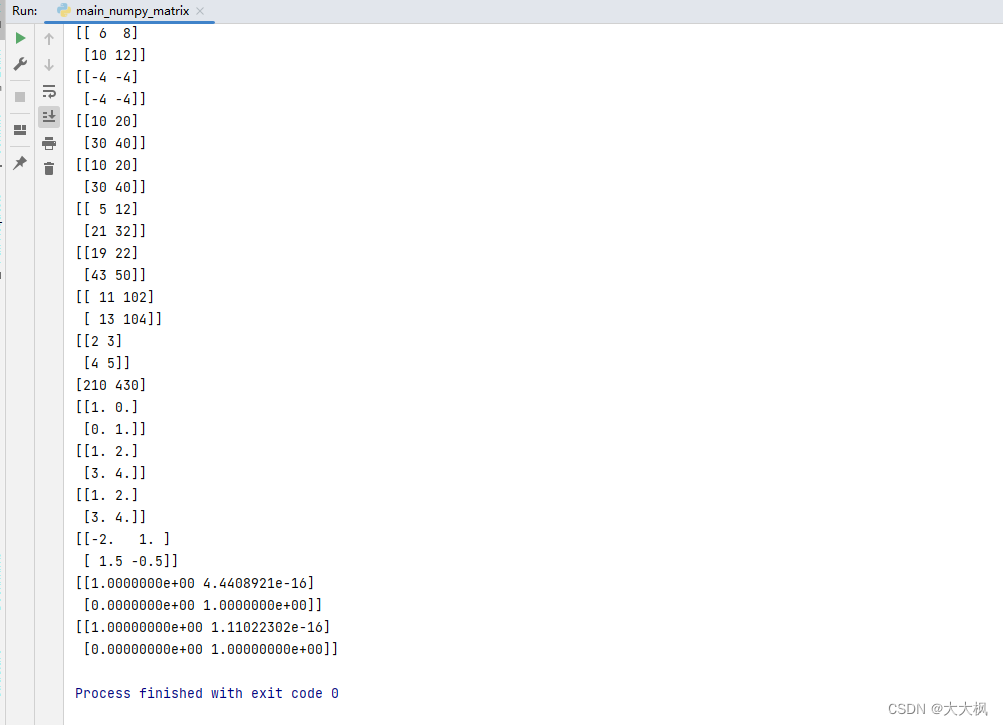
numpy_matrix.py
import numpy as npif __name__ == "__main__":# 矩阵的创建A = np.array([[1, 2], [3, 4]])print(A)# 矩阵的属性print(A.shape)print(A.T)# 获取矩阵的元素print(A[1, 1])print(A[0])print(A[:, 0])print(A[1, :])# 矩阵的基本运算B = np.array([[5, 6], [7, 8]])print(A + B)print(A - B)print(10 * A)print(A * 10)print(A * B)print(A.dot(B))p = np.array([10, 100])print(A + p)print(A + 1)print(A.dot(p))# 单位矩阵I = np.identity(2)print(I)print(A.dot(I))print(I.dot(A))# 逆矩阵invA = np.linalg.inv(A)print(invA)print(invA.dot(A))print(A.dot(invA))# C = np.array([[1, 2, 3], [4, 5, 6]])# np.linalg.inv(C)