磁阻传感器提供的输出信号几乎不受磁场变动、磁温度系数、磁传感器距离与位置变动影响,可以达到高准确度与高效能,因此相当适合各种要求严格的车用电子与工业控制的应用。所以它远比采用其它传感方法的器件更具有优势。

机器人的应用日渐广泛,对工业生产与提高效能有重要作用。工业机器人主要利用伺服电机进行运动控制,从而实现移动和抓取工具。本文将详细讨论伺服电机的特点以及不同类型伺服电机相应的控制原理。
运动控制与机器人密切相关。工业应用中的机器人必须透过由多款电机所构成的致动器才能自行移动,以执行任务或透过机器手臂抓取工具。
机器人的运动控制系统通常由电机控制器、电机驱动、电机本体(多为伺服电机)组成。电机控制器具备智能运算功能,并可传送指令以驱动电机。驱动可提供增压电流,根据控制器指令以驱动电机。电机可以直接移动机器人,也可通过传动系统或链条系统让机器人移动。
差动驱动原理:差动驱动是指左右两个驱动轮分别由一个电机驱动,通过控制两个驱动轮的运动速度和方向实现机器人的转向。左右轮速度的不同可以使机器人产生旋转运动。
舵轮/转向齿轮原理:机器人通过操控一个或多个舵轮(也称转向齿轮)的方向和转速来实现转向。舵轮通常位于机器人的前部或后部,当舵轮旋转时,机器人就会围绕轮子的轴线旋转。
传感器测量磁铁磁场方位角时可以达到小于0.07度的分辨率。测量磁场方向对于测量磁场强度的优势在于:对于磁铁温度系数不敏感,冲击和振荡影响小,可用于磁铁和传感器之间的多种介质。这些传感器可以在3瓦特功率下达到0-5mhz的带宽响应。输出是标准的惠斯通电桥结构。因为没有运动电子组件,传感器具有长工作寿命,高可靠性和精确性等优点。
机器人方向控制中应用的磁阻角度传感芯片
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/310141.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

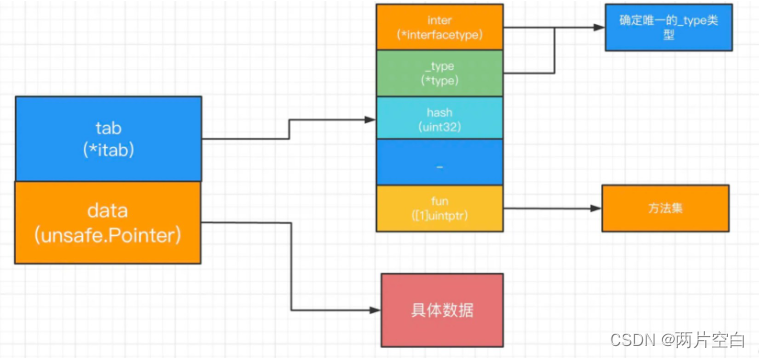
鸿蒙开发学习笔记第一篇--TypeScript基础语法
目录
前言
一、ArkTS
二、基础语法
1.基础类型
1.布尔值
2.数字
3.字符串
4.数组
5.元组
6.枚举
7.unkown
8.void
9.null和undefined
10.联合类型
2.条件语句
1.if语句
1.最简单的if语句
2.if...else语句
3.if...else if....else 语句
2.switch语句
5.函数…
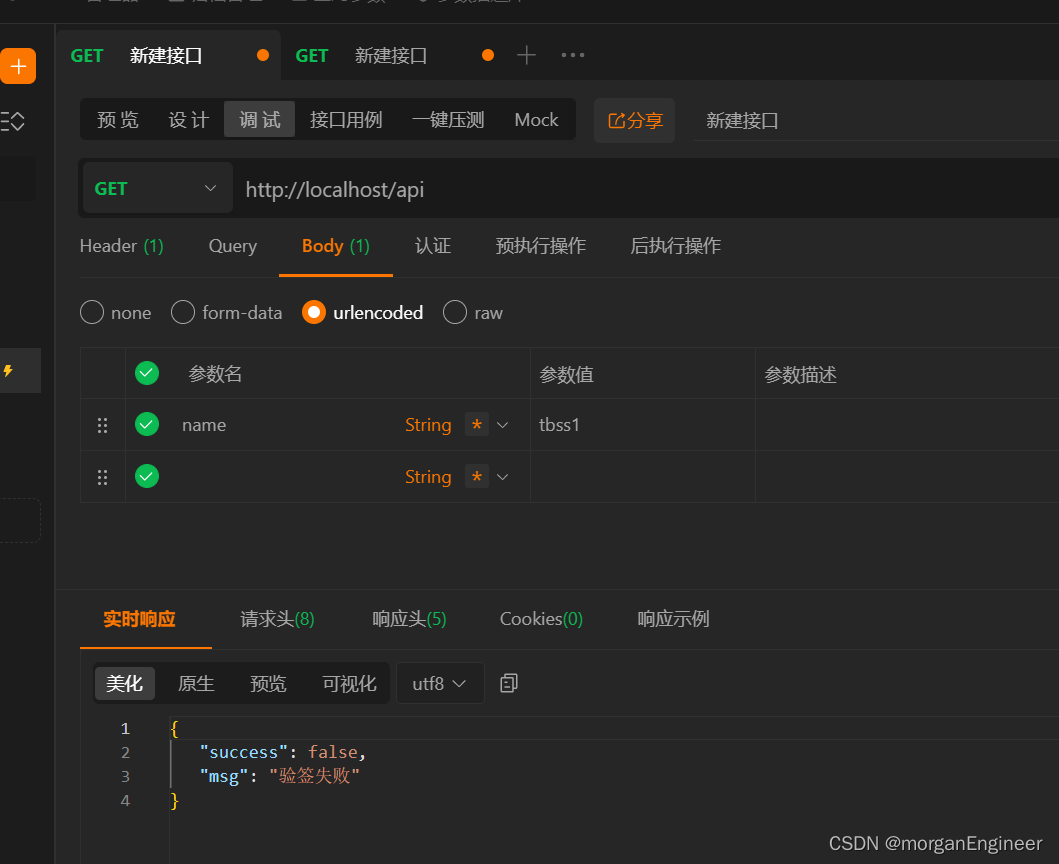
OpenResty,Nginx实现接口验签与黑名单控制
介绍
nginx与openresty是两种优秀知名的7层负载均衡软件,nginx以其出色的性能和稳定性成为首选,而openresty则是在Nginx基础上构建的,支持嵌入Lua语言,大幅提升了开发效率。
安装OpenResty
版本 openresty-1.25.3.1-win64下载地…
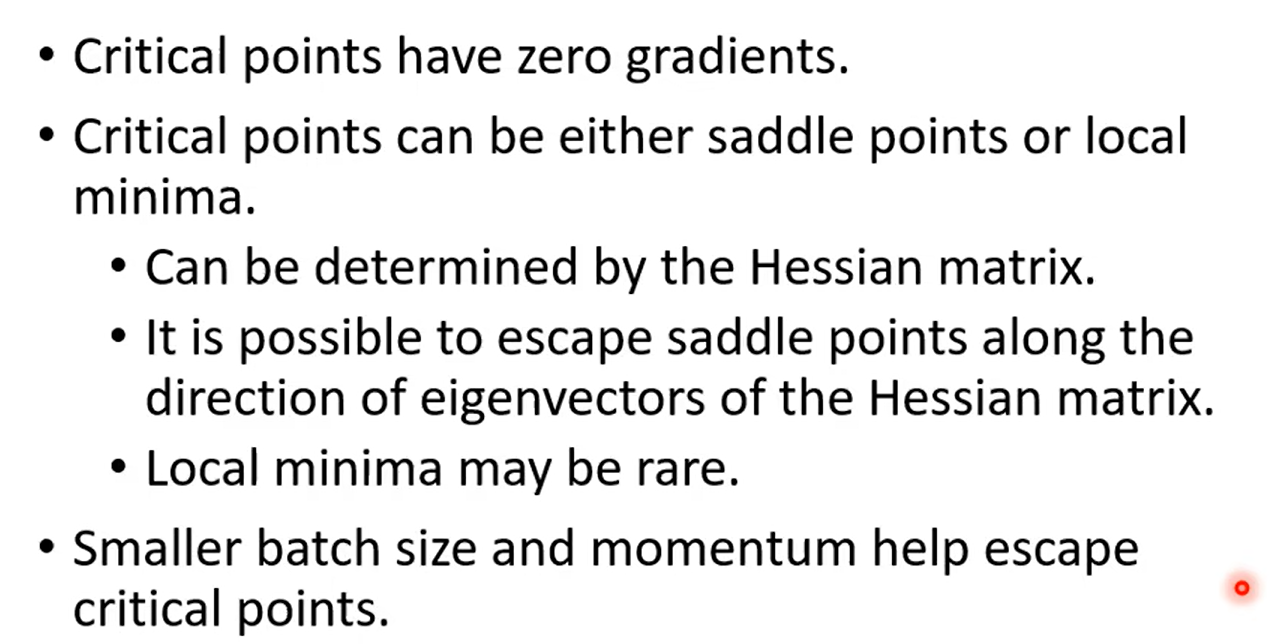
机器学习和深度学习--李宏毅(笔记与个人理解)Day11-12
Day11 when gradient is small…… 怎么知道是局部小 还是鞍点?
using Math 这里巧妙的说明了hessan矩阵可以决定一个二次函数的凹凸性 也就是 θ \theta θ 是min 还是max,最后那个有些有些 哈 是一个saddle; 然后这里只要看hessan矩阵是不…

STM32学习和实践笔记(5):时钟树
STM32一共有4个时钟源。外部时钟高低速各一个,内部时钟高低速各一个。
外部高速时钟是:4-16MHZ的HSE OSC。HS表示高速high speed. E表示外部的external。开发板该处安装的8M晶振。
外部低速时钟是:32.768KHz的LSI OSC。LS表示高速low speed…
强大的压缩和解压缩工具 Keka for Mac
Keka for Mac是一款功能强大的压缩和解压缩工具,专为Mac用户设计。它支持多种压缩格式,包括7z、Zip、Tar、Gzip和Bzip2等,无论是发送电子邮件、备份文件还是节省磁盘空间,Keka都能轻松满足用户需求。 这款软件的操作简单直观&…

用c++实现串匹配问题、选择排序
5.2.2 串匹配问题
【问题】 给定两个字符串S和T,在主串S中查找子串T的过程称为串匹配(string matching,也称模式匹配),T称为模式。在文本处理系统、操作系统、编译系统、数据库系统以及 Internet 信息检索系统中,串匹配是使用最频…
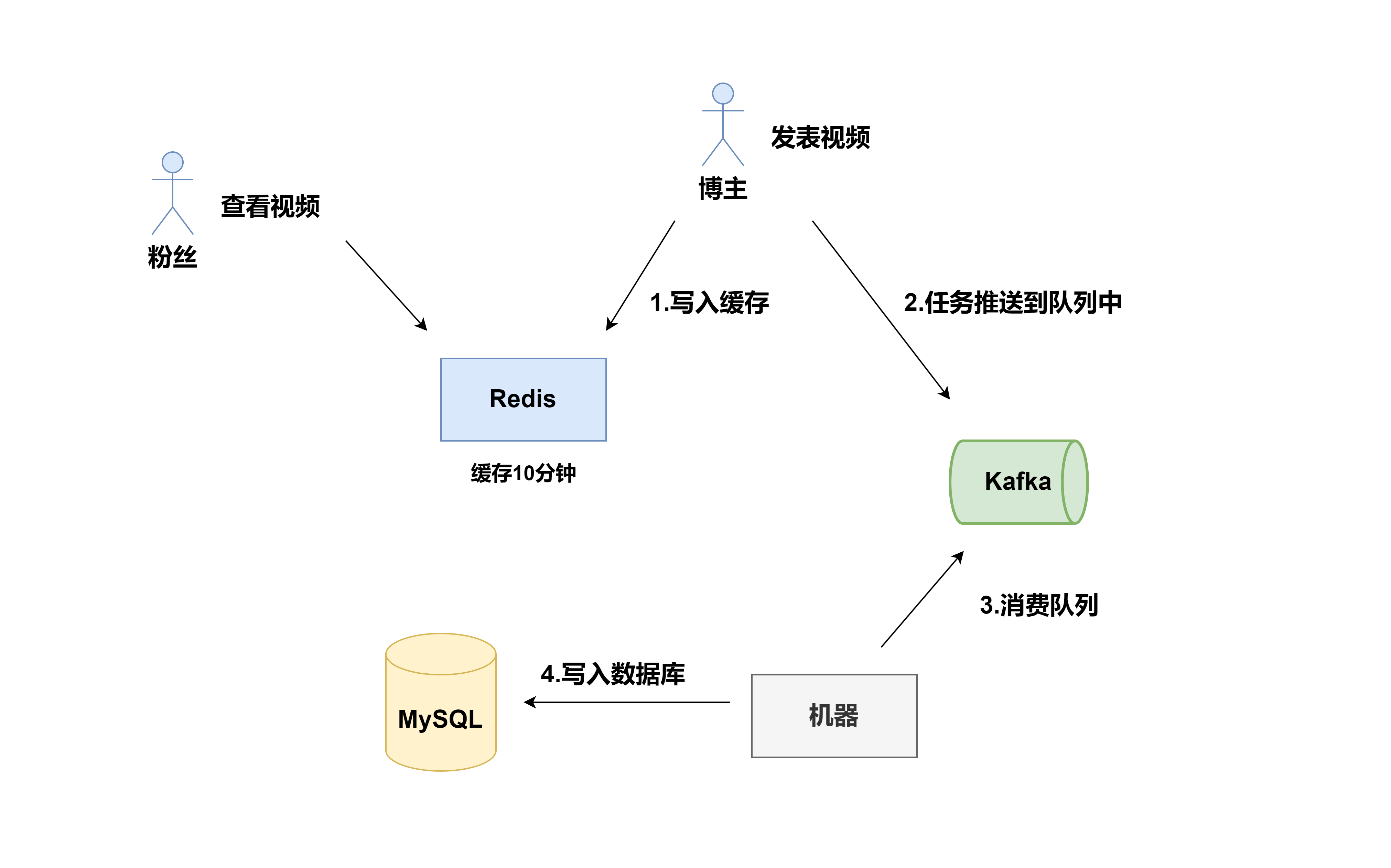
分布式系统:缓存与数据库一致性问题
前言
缓存设计是应用系统设计中重要的一环,是通过空间换取时间的一种策略,达到高性能访问数据的目的;但是缓存的数据并不是时刻存在内存中,当数据发生变化时,如何与数据库中的数据保持一致,以满足业务系统…
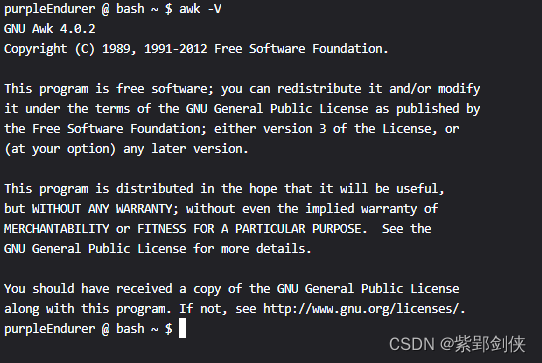
Linux shell编程学习笔记46:awk命令的由来、功能、格式、选项说明、版权、版本
0 前言
在编写Linux Shell脚本的过程中,我们经常要对Linux命令执行的结果进行分析和提取,Linux也在文本分析和提取这方面提供了不少的命令。比如我们之前研究过的cut命令。
Linux shell编程学习笔记43:cut命令https://blog.csdn.net/Purple…

史上最全excel导入功能测试用例设计(以项目为例)
web系统关于excel的导入导出功能是很常见的,通常为了提高用户的工作效率,在维护系统中的一些数据的时候,批量导入往往比一个一个添加或者修改快很多。针对导入功能的测试,往往会有很多种情况,现在针对平时项目中遇到的…

Excel·VBA二维数组S形排列
与之前的文章《ExcelVBA螺旋数组函数》将一维数组转为二维螺旋数组 本文将数组转为S形排列的二维数组,类似考场座位S形顺序
Function S形排列(ByVal arr, ByVal num_rows&, ByVal num_cols&, Optional ByVal mode$ "row")将数组arr转为num_rows…

Home Assistant OS转 Hassio Supervisor(docker 版本)
这是一个失败案例,请忽略。
原因
HAOS缺点:系统不是很好用,无法满足我在上面使用python开发插件的小需求(或许有方法满足,但是我没找到)。 HAOS优点:方便安装,配置非常方便。
数据…
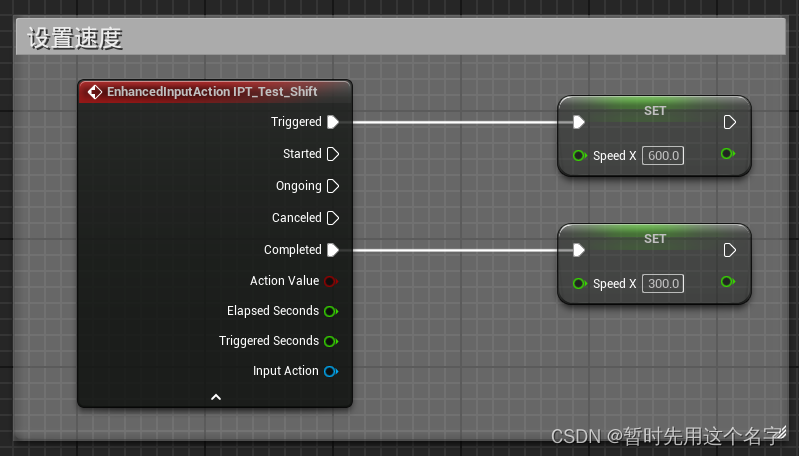
UE5学习日记——实现自定义输入及监听输入,组合出不同的按键输入~
UE5的自定义按键和UE4有所不同,在这里记录一下。 本文主要是记录如何设置UE5的自定义按键,重点是学会原理,实际开发时结合实际情况操作。
输入映射
1. 创建输入操作 输入操作并不是具体的按键映射,而是按键的激活方式࿰…

面试官:说一说CyclicBarrier的妙用!我:这个没用过...
写在开头
面试官:同学,AQS的原理知道吗? 我:学过一点,抽象队列同步器,Java中很多同步工具都是基于它的… 面试官:好的,那其中CyclicBarrier学过吗?讲一讲它的妙用吧 我&…

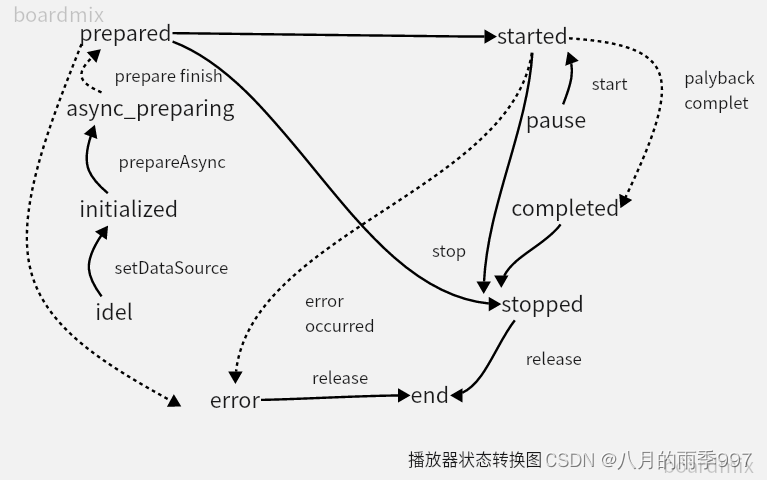
FFmpeg: 自实现ijkplayer播放器--04消息队列设计
文章目录 播放器状态转换图播放器状态对应的消息: 消息对象消息队列消息队列api插入消息获取消息初始化消息插入消息加锁初始化消息设置消息参数消息队列初始化清空消息销毁消息启动消息队列终止消息队列删除消息 消息队列,用于发送,设置播放…
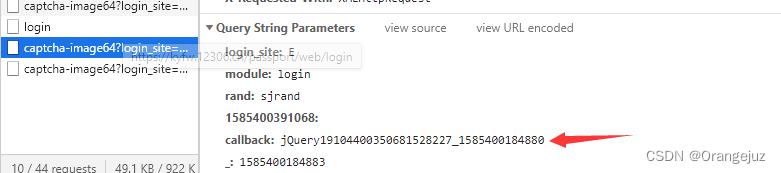
破译验证码reCAPTCHA 之 打码平台
由于登录需要验证码,除了日常的字符串+数字,此时就需要用第三方插件进行破译。 reCaptcha是Google公司的验证码服务,方便快捷,改变了传统验证码需要输入n位失真字符的特点。 1. reCAPTCHA 初识
reCaptcha是Google公司…
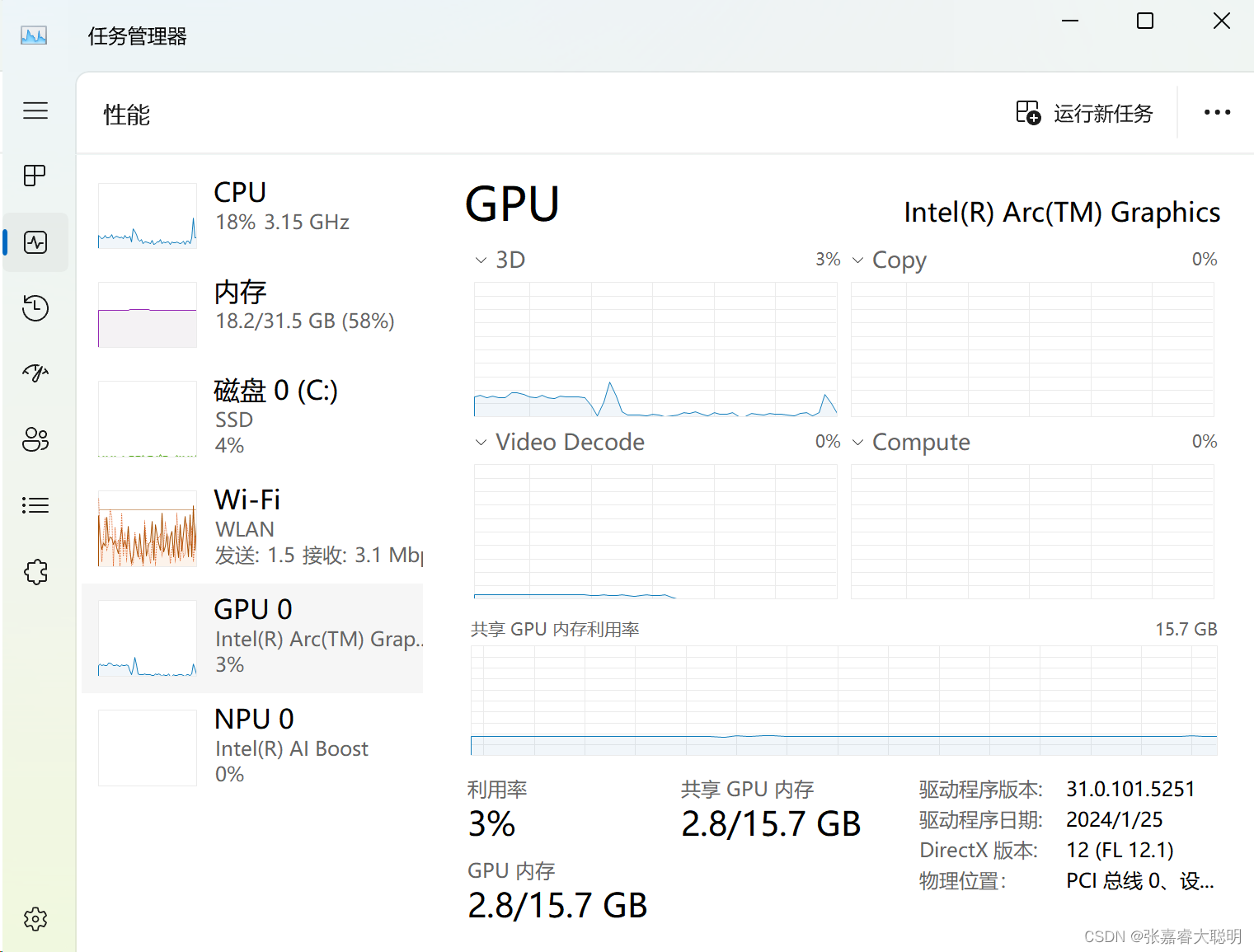
1、IPEX-LLM(原名BigDL-LLM)环境配置
IPEX-LLM 是一个为Intel XPU (包括CPU和GPU) 打造的轻量级大语言模型加速库,在Intel平台上具有广泛的模型支持、最低的延迟和最小的内存占用。 您可以使用 IPEX-LLM 运行任何 PyTorch 模型(例如 HuggingFace transformers 模型)。在运行过程中…
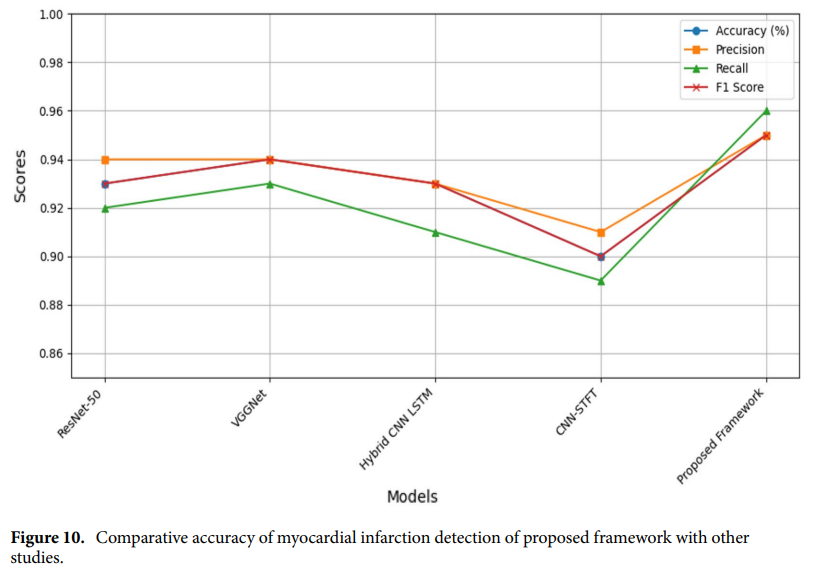
结合创新!ResNet+Transformer,高性能低参数,准确率达99.12%
今天给各位介绍一个发表高质量论文的好方向:ResNet结合Transformer。
ResNet因其深层结构和残差连接,能够有效地从图像中提取出丰富的局部特征。同时,Transformer的自注意力机制能够捕捉图像中的长距离依赖关系,为模型提供全局上…

世界需要和平--中介者模式
1.1 世界需要和平 "你想呀,国与国之间的关系,就类似于不同的对象与对象之间的关系,这就要求对象之间需要知道其他所有对象,尽管将一个系统分割成许多对象通常可以增加其可复用性,但是对象间相互连接的激增又会降低…
推荐文章
- 软考-高级-系统架构设计师教程(清华第2版)【第6章 数据库设计基础知识(234~262)-思维导图】
- 序列类型 --- list, tuple, range
- !!学习整理知识模块——关于【如何本地搭建Whisper语音识别模型】/请按需收藏!!
- #nlp|jieba分词词性对照
- #onenet网络请求http(GET,POST)
- #获取A股所有股票代码
- (11)MATLAB莱斯(Rician)衰落信道仿真2
- (java+Seleniums3)自动化测试实战
- (二)结构型模式:8、代理模式(Proxy Pattern)(C++示例)
- (框架设计-基础库建设) boost 库
- (每日一问)计算机网络:GET请求和POST请求的区别
- (十一) Docker compose 部署 Mysql 和 其它容器