文章目录
- Tips
- 00 基础概念
- 001:准确率、精确率、召回率、ROC和AUC
- 01: 自动驾驶专栏
- 1.1 Apollo进阶课程
- 1.2 自动驾驶感知融合专栏
- 1.3 运动规划专题
- 1.4 机器学习十大算法系列
- 1.5: 深度学习在线书籍
- 02: 规划控制
- 2.1 动态规划:
- 2.2 二次规划
- 三级标题
- 四级标题
- 五级标题
- 六级标题
- 03: 神经网络与深度学习
- 3.1 一文读懂目标检测:R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD
- 3.2: BAT机器学习面试1000题系列
- 04:激光雷达
- 4.1 激光雷达性能参数
- 5.1: 定位
- 6、 硬件
- 6.1 UART相关知识总结
- 6.2 SPI、UART、I2C通信的区别与应用
Tips
2023/04/20 本周主要梳理自动驾驶规控算法
00 基础概念
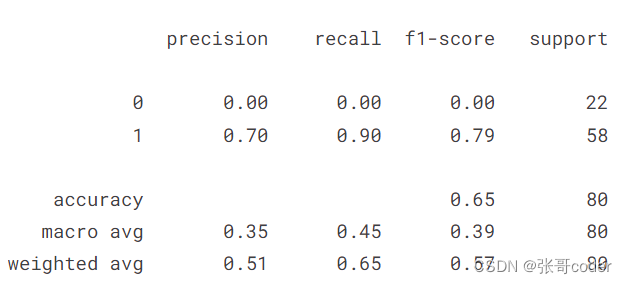
001:准确率、精确率、召回率、ROC和AUC
https://zhuanlan.zhihu.com/p/557394098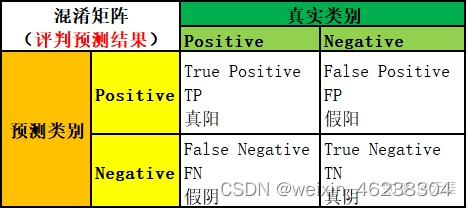01: 自动驾驶专栏
1.1 Apollo进阶课程
https://blog.csdn.net/cg129054036/category_8535146.html
前馈环控制器的主要控制策略有很多种,这里主要介绍三种,分别是Optimal Control(优化控制)、 Adaptive Control(自适应控制)、Robust Control(鲁棒性控制),如图3所示。
1.2 自动驾驶感知融合专栏
https://blog.csdn.net/yuan2520?type=blog
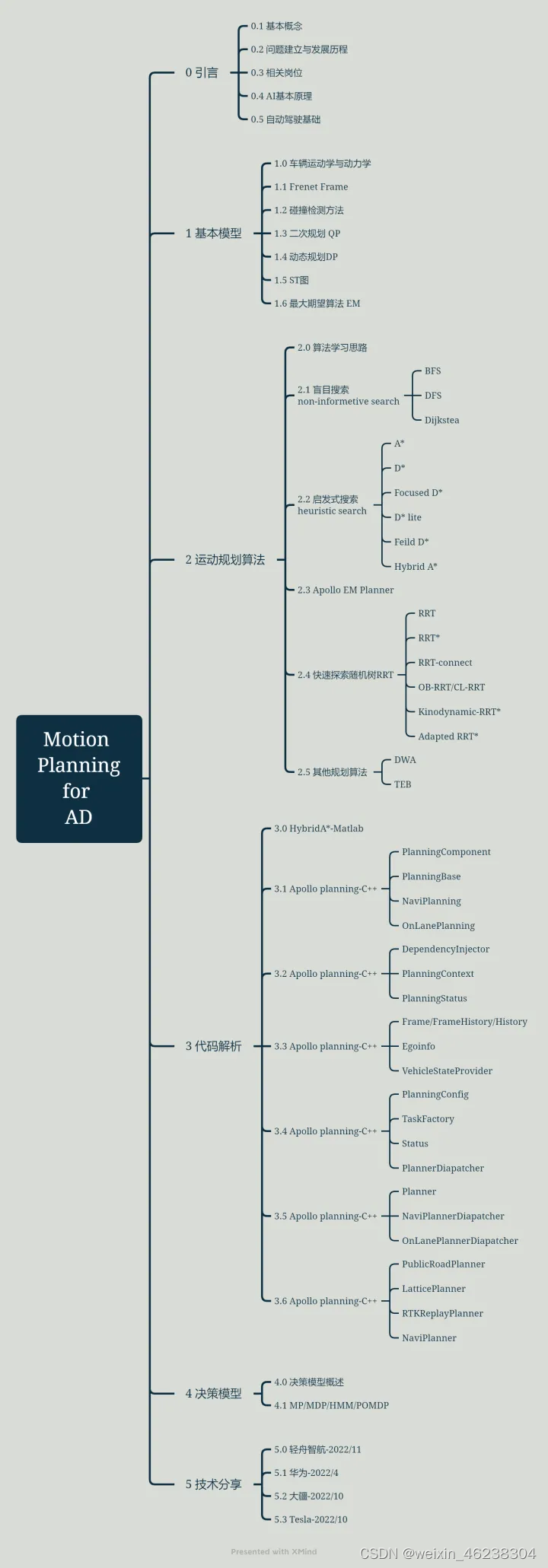
1.3 运动规划专题
[运动规划-自动驾驶] 运动规划专题目录
https://zhuanlan.zhihu.com/p/546884331
1.4 机器学习十大算法系列
https://blog.csdn.net/v_july_v/category_9261611.html
内容摘要:
强化学习极简入门:通俗理解MDP、DP MC TC和Q学习、策略梯度、PPO
数据挖掘领域十大经典算法初探
从决策树学习谈到贝叶斯分类算法、EM、HMM
支持向量机通俗导论(理解SVM的三层境界)
从K近邻算法、距离度量谈到KD树、SIFT+BBF算法
概率统计极简入门:通俗理解微积分/期望方差/正态分布前世今生(23修订版)
最大熵模型中的数学推导
Adaboost 算法的原理与推导
从拉普拉斯矩阵说到谱聚类
从贝叶斯方法谈到贝叶斯网络
通俗理解LDA主题模型
Machine Learning读书会,面试算法讲座,创业活动,算法班(历届汇总)
CNN笔记:通俗理解卷积神经网络
教你从头到尾利用DL学梵高作画:GTX 1070 cuda 8.0 tensorflow gpu版
手把手教你搭建caffe及手写数字识别
如何从零起步学习AI
GAN之父在NIPS 2016上做的报告:两个竞争网络的对抗(含译文下载)
BAT机器学习面试1000题系列
图解CNN:通过100张图一步步理解CNN
一文读懂特征工程
一文通透优化算法:从梯度下降、SGD到牛顿法、共轭梯度(23修订版)
通俗理解kaggle比赛大杀器xgboost
如何通俗理解EM算法
如何从RNN起步,一步一步通俗理解LSTM
如何通俗理解Word2Vec
程序员面试、算法研究、编程艺术、红黑树、机器学习5大系列集锦
ChatGPT技术原理解析:从RL之PPO算法、RLHF到GPT4、instructGPT
1.5: 深度学习在线书籍
zh.d2l.ai
《动手学深度学习》
02: 规划控制
2.1 动态规划:
如果一个问题,可以把所有可能的答案穷举出来,并且穷举出来后,发现存在重叠子问题,就可以考虑使用动态规划。https://blog.csdn.net/u010365819/article/details/121000532穷举分析确定边界找规律,确定最优子结构状态转移方程
2.2 二次规划
https://zhuanlan.zhihu.com/p/595726837
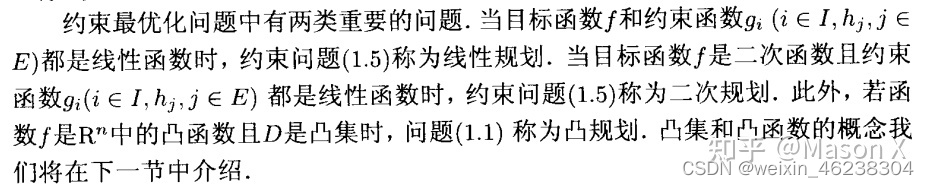
https://zhuanlan.zhihu.com/p/527920446一个有n个变数与m个限制的二次规划问题可以用以下的形式描述。首先给定:一个n 维的向量 c一个n × n 维的对称矩阵Q( 是二次型)一个m × n 维的矩阵A一个m 维的向量 b
三级标题
四级标题
五级标题
六级标题
03: 神经网络与深度学习
3.1 一文读懂目标检测:R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD
https://blog.csdn.net/v_JULY_v/article/details/80170182?spm=1001.2014.3001.5502
3.2: BAT机器学习面试1000题系列
https://blog.csdn.net/v_JULY_v/article/details/78121924
04:激光雷达
4.1 激光雷达性能参数
https://blog.csdn.net/weijimin1/article/details/93512218?ops_request_misc=&request_id=&biz_id=102&utm_term=%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE%E7%9A%84%E6%80%A7%E8%83%BD%E8%A6%81%E6%B1%82&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-1-93512218.142^v86^insert_down28v1,239^v2^insert_chatgpt&spm=1018.2226.3001.4187激光雷达的主要性能参数有激光的波长、探测距离、FOV(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、IP防护等级、功率、供电电压、激光发射方式(机械/固态)、使用寿命等。激光雷达的优势非常明显,其探测的范围更广,且精度更高。但是在极端天气或者烟雾环境下性能大大降低,而且由于其数据采集量大,价格也非常贵。
#05 地图与定位
5.1: 定位
PPP-RTK(一),自动驾驶高精定位的“搅局者”
https://mp.weixin.qq.com/s?__biz=MzI2NDY3OTExNw==&mid=2247488984&idx=1&sn=76e37d783781eac2854ea6e867110a1c&chksm=eaa9ae7addde276c8eab644b73411fa1f58087bb338e2eaf1fbeeb084eb94ccbce61e30f9465&mpshare=1&scene=1&srcid=0515ge5DZVE2JwnaNfF8k3s1&sharer_sharetime=1684120093910&sharer_shareid=900a0cd48eecd26be522706e5fa862e9&version=4.1.3.6008&platform=win#rd
6、 硬件
6.1 UART相关知识总结
https://blog.csdn.net/weixin_43580872/article/details/124138659
(1)UART的传输速率
(以下速率描述内容摘自https://blog.csdn.net/ss343fd/article/details/54880037)
RS232:传输速率一般不超过20Kbps,速率低,抗干扰能力差,RS-232C能传输的最大距离不超过15m(50英尺)。
RS422:定义了一种平衡通信接口,将传输速率提高到10Mbps,传输距离延长到4000英尺(速率低于100Kbps时),并允许在一条平衡总线上连接最多10个接收器。RS-422是一种单机发送、多机接收的单向、平衡传输规范,被命名为TIA/EIA-422-A标准。
RS485:增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围,后命名为TIA/EIA-485-A标准。最高传输速率10Mbps,抗干扰能力强,可以传距离1.5km。
平衡双绞线的长度与传输速率成反比,在100Kbps速率以下,才可能使用规定最长的电缆长度。只有在很短的距离下才能获得最高速率传输。一般100米长双绞线最大传输速率仅为1Mbps。
6.2 SPI、UART、I2C通信的区别与应用
https://zhuanlan.zhihu.com/p/450963372
SPI
SPI通讯无起始位和停止位,因此数据可以连续流传输而不会中断;没有像I2C这样的复杂的从站寻址系统,数据传输速率比I2C更高(几乎快两倍)。独立的MISO和MOSI线路,可以同时发送和接收数据。
SPI使用四根线(I2C和UART使用两根线),没有信号接收成功的确认(I2C拥有此功能),没有任何形式的错误检查(如UART中的奇偶校验位等)。
UART
优劣没有任何通信协议是完美的,但是UART非常擅长于其工作。以下是一些利弊,可帮助您确定它们是否适合您的项目需求:
优点
仅使用两根电线
无需时钟信号
具有奇偶校验位以允许进行错误检查
只要双方都设置好数据包的结构
有据可查并得到广泛使用的方法
缺点
数据帧的大小最大为9位
不支持多个从属系统或多个主系统
每个UART的波特率必须在彼此的10%之内
I2C通信
优劣与其他协议相比,I2C可能听起来很复杂。以下是一些利弊,可帮助您确定它们是否适合您的项目需求:优点仅使用两根电线支持多个主机和多个从机每个UART的波特率必须在彼此的10%之内硬件比UART更简单众所周知且被广泛使用的协议缺点数据传输速率比SPI慢数据帧的大小限制为8位
I2C协议v2.1规定了100K,400K和3.4M三种速率(bps)。SPI是一种事实标准,由Motorola开发,并没有一个官方标准。已知的有的器件SPI已达到50Mbps。具体到产品中SPI的速率主要看主从器件SPI控制器的性能限制。
SPI最大传输速率受以下几个条件影响:
SPI的最大时钟频率
CPU处理SPI数据的能力
输出端驱动能力(PCB所允许的最大信号传输速率)