文章目录
- 一、安装依赖
- 二、进入工作空间克隆
- 三、编译
- 四、运行
一、安装依赖
tf2_geometry_msgs
ackermann_msgs
joy
map_server
sudo apt-get install ros-noetic-tf2-geometry-msgs ros-noetic-ackermann-msgs ros-melodic-joy ros-noetic-map-server
二、进入工作空间克隆
cd ~/catkin_ws/src
git clone https://github.com/f1tenth/f1tenth_simulator.git
三、编译
cd ~/catkin_ws
catkin_make
source devel/setup.bash
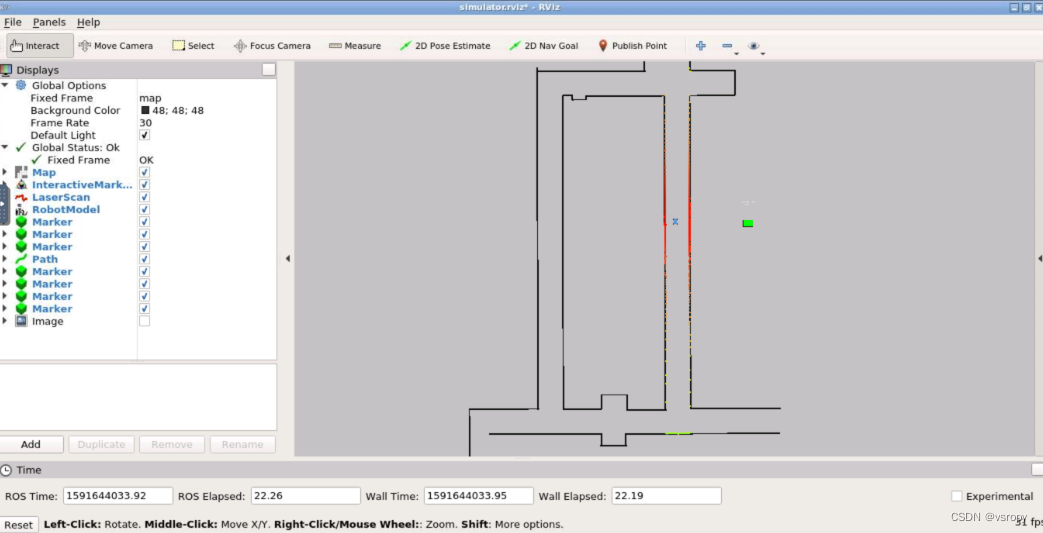
四、运行
roslaunch f1tenth_simulator simulator.launch